| Citation: |
ZHANG Qingyi, GU Baoxing, JI Changying, FANG Huimin, GUO Jun, SHEN Wenlong. Design and experiment of an online grading system for apple[J]. Journal of South China Agricultural University, 2017, 38(4): 117-124. DOI: 10.7671/j.issn.1001-411X.2017.04.019

|
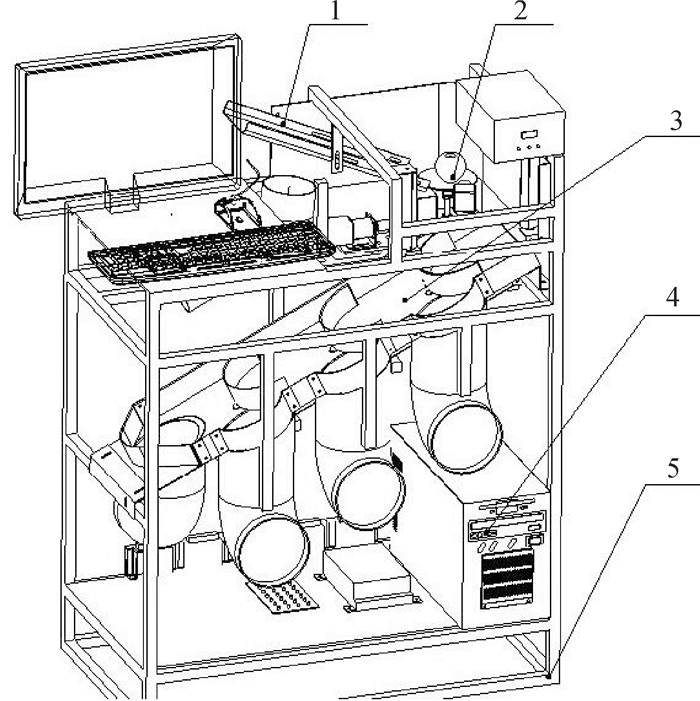
To design a matched online grading system based on the structure and working behavior of the apple harvesting robot, and meet the needs of grading apples in real time.
The pre-grading principle was proposed to eliminate apples with diameters below standard which could improve the grading efficiency. Apple weight was measured by a force sensor and the weight grade was determinated. Apple size and rot area were detected using the machine vision technology. The image processing algorithm and interface control program were developed using Matlab and VS2008. The distributed control network was constructed based on CAN bus. Comprehensive grading tests on apples were performed.
The determination coefficient of apple actual diameter and detected diameter was 0.990 3, the determination coefficient of the actual weight and test weight was 0.999 6, the determination coefficient of actual rotting area and detected rotting area was 0.985 5. The success rate of comprehensive grading reached 89.71%, and the average grading time per apple was 2.89 s during continuous grading.
The apple grading system is stable, easy to expand, highly efficient and accurate, and can meet the real-time grading needs of the apple harvesting robot.
| [1] |
李先锋, 朱伟兴, 花小朋, 等.基于D-S证据理论的决策级多特征融合苹果分级方法[J].农业机械学报, 2011, 42(6): 188-192. http://www.cnki.com.cn/Article/CJFDTOTAL-NYJX201106039.htm
|
| [2] |
殷勇, 陶凯, 于慧春.基于机器视觉的苹果分级中特征参量选择方法[J].农业机械学报, 2012, 43(6): 118-121. http://www.cnki.com.cn/Article/CJFDTOTAL-NYJX201206023.htm
|
| [3] |
BLASCO J, ALEIXOS N, CUBERO S, et al. Fruit, vegetable and nut quality evaluation and control using computer vision[M]. Cambridge: Woodhead Publishing, 2012: 379-399.
|
| [4] |
GARRIDO N C, PEREZ M D, AMIGO J M, et al. Grading and color evolution of apples using RGB and hyperspectral imaging vision cameras[J]. J Food Eng, 2012, 113(2): 281-288. doi: 10.1016/j.jfoodeng.2012.05.038
|
| [5] |
LEEMANS V, DESTAIN M F. A real-time grading method of apples based on features extracted from defects[J]. J Food Eng, 2004, 61(1): 83-89. doi: 10.1016/S0260-8774(03)00189-4
|
| [6] |
张麒麟, 姬长英, 高峰, 等.苹果采摘机械手对果实损伤的影响[J].食品工业科技, 2011, 32(12): 404-405. http://youxian.cnki.com.cn/yxdetail.aspx?filename=NYJX20170707001&dbname=CAPJ2015
|
| [7] |
吝凯, 王维新.果品的冲击损伤研究现状及发展趋势[J].农机化研究, 2010, 38(1): 233-235. http://www.cnki.com.cn/Article/CJFDTOTAL-NJYJ201001067.htm
|
| [8] |
赵启明. 6GF-500型小杂果分级技术装备的开发[J].中国农机化学报, 2013, 34(1): 142-145. http://www.cnki.com.cn/Article/CJFDTOTAL-GLJH201301036.htm
|
| [9] |
毛华先, 莫建灿, 方连发, 等.水果品质智能化实时检测和分级系统研究[J].农机化研究, 2010, 32(10): 95-97. doi: 10.3969/j.issn.1003-188X.2010.10.023
|
| [10] |
饶秀勤. 基于机器视觉的水果品质实时检测与分级生产线的关键技术研究[D]. 杭州: 浙江大学, 2007.
|
| [11] |
南京农业大学. 一种苹果分级执行机构: 201620277082. 9[P]. 2016-09-07.
|
| [12] |
李庆中. 苹果自动分级中计算机视觉信息快速获取与处理技术的研究[D]. 北京: 中国农业大学, 2000.
|
| [13] |
中华人民共和国国家质量监督检验检疫总局, 中国国家标准化管理委员会. 鲜苹果: GB/T 10651—2008[S]. 北京: 中国标准出版社: 2008.
|
| [14] |
中华人民共和国农业部. 红富士苹果: NY/T 1075—2006[S]. 北京: 中国标准出版社, 2006.
|
| [15] |
ZHANG B H, HUANG W Q, LI J B, et al. Principles, developments and applications of computer vision for external quality inspection of fruits and vegetables: A review[J]. Food Res Int, 2014, 62: 326-343. doi: 10.1016/j.foodres.2014.03.012
|
| [16] |
CUBERO S, ALEIXOS N, MOLTO E, et al. Advances in machine vision applications for automatic inspection and quality evaluation of fruits and vegetables[J]. Food Bioprocess Tech, 2011, 4(4): 487-504. doi: 10.1007/s11947-010-0411-8
|
| [17] |
朱蓓. 苹果全表面图像信息获取方法的研究[D]. 杭州: 浙江大学, 2013.
|
| [18] |
曹乐平, 何建湖, 黄中培, 等.基于计算机视觉的图像采集对水果分级准确率的影响[J].西北农业学报, 2008, 17(1): 282-285. http://www.cnki.com.cn/Article/CJFDTOTAL-XBNX200801068.htm
|
| [19] |
应义斌, 成芳, 马俊福.基于最小矩形法的柑桔横径实时检测方法研究[J].生物数学学报, 2004, 31(3): 352-356. http://www.cnki.com.cn/Article/CJFDTOTAL-SWSX200403014.htm
|
| [20] |
冯斌, 汪懋华.基于计算机视觉的水果大小检测方法[J].农业机械学报, 2003, 34(1): 73-75. http://www.cnki.com.cn/Article/CJFDTOTAL-NYJX200301022.htm
|
| [21] |
RIQUELME M T, BARRERIRO P, RUIZ A M, et al. Olive classification according to external damage using image analysis[J]. J Food Eng, 2008, 87(3): 371-379. doi: 10.1016/j.jfoodeng.2007.12.018
|
| [22] |
刘佳男. 基于机器视觉的水果表面腐烂伤识别方法的研究[D]. 无锡: 江南大学, 2012.
|
| [23] |
安秋. 农业机器人视觉导航系统及其光照问题的研究[D]. 南京: 南京农业大学, 2008.
|
| [24] |
李旭辉, 李俊山, 李建军, 等. VC调用MATLAB图形图像处理方法研究[C]//中国计算机学会. 2004年全国第5届嵌入式系统学术交流会论文集. 北京: 中国计算机学会, 2004: 73-77.
|
| [25] |
李文煜. VC与Matlab混合编程实现图像处理[J].计算机仿真, 2005, 22(1): 254-257. http://www.cnki.com.cn/Article/CJFDTOTAL-JSJZ200501072.htm
|
| [1] | ZHONG Haimin, MA Xu, LI Zehua, WANG Xicheng, LIU Saisai, LIU Weiwen, WANG Cheng’en, LIN Yongda. Rapid grading detection on hybrid rice bud seeds based on improved YOLOv5 model[J]. Journal of South China Agricultural University, 2023, 44(6): 960-967. DOI: 10.7671/j.issn.1001-411X.202209015 |
| [2] | JIANG Dong, XIAO Maohua, ZHANG Haijun, ZHOU Junbo, ZHU Hong, WANG Xiaochan, CHEN Shuang. Water quality monitoring and grade judgment system based on IGWOPSO-SVM algorithm[J]. Journal of South China Agricultural University, 2023, 44(4): 638-648. DOI: 10.7671/j.issn.1001-411X.202207034 |
| [3] | FENG Zihan, GONG Jinliang, ZHANG Yanfei. Recognition algorithm of drivable area between rows of fruit trees based on double robustness regression[J]. Journal of South China Agricultural University, 2023, 44(1): 161-169. DOI: 10.7671/j.issn.1001-411X.202205029 |
| [4] | LUO Mingdao, HONG Zhou, LI Ke, XU Daping, ZHANG Ningnan, MAI Baoying, HUANG Xizhao. Grading standards of one-year-old container seedlings of Dalbergia cochinchinensis[J]. Journal of South China Agricultural University, 2019, 40(2): 76-82. DOI: 10.7671/j.issn.1001-411X.201806017 |
| [5] | LI Jiawei, CHEN Yan, WANG Jiasheng, LIU Weiwei, ZENG Zeqin, ZOU Xiangjun. Parameter optimization of automatic grading and monomeric delivery device of litchi[J]. Journal of South China Agricultural University, 2018, 39(4): 93-99. DOI: 10.7671/j.issn.1001-411X.2018.04.015 |
| [6] | AO Yan. Establishment of comprehensive evaluation index system of Xanthoceras sorbifolia types[J]. Journal of South China Agricultural University, 2016, 37(4): 46-50. DOI: 10.7671/j.issn.1001-411X.2016.04.008 |
| [7] | ZHU Sheng-lin,YANG Bo,ZHANG Ming-wu. Research on a Comprehensive Trust Management Model in Distributed Systems[J]. Journal of South China Agricultural University, 2007, 28(2): 113-115. DOI: 10.7671/j.issn.1001-411X.2007.02.029 |
| [8] | Monchai DAUNGJINDA. Software applications for providing comprehensive computing capabilities to problems related to mixed models in animal breeding[J]. Journal of South China Agricultural University, 2005, 26(Z1). |
| [9] | CHEN Fei peng 1,LI Mou zhao 1,WANG Dian bei 2,LAN Sheng fang 1. Comprehensive Evaluation of the Cultivation System in Sanshui City of the Northwest Pearl River Delta[J]. Journal of South China Agricultural University, 2002, 23(2): 1-4. DOI: 10.7671/j.issn.1001-411X.2002.02.001 |
| [10] | Liu Yu, Feng Qihui, Zang Fuyan ,Liang Yuli ,Zhou Yunkun. A COMPREHENSIVE STUDY OF MASTITIS CONTROL ON A DAIRY FARM[J]. Journal of South China Agricultural University, 1995, (1): 29-33. |
Supported by: Beijing Renhe Information Technology Co., Ltd. 
 DownLoad:
DownLoad: