- Chinese Core Journal
- Chinese Science Citation Database (CSCD) Source journal
- Journal of Citation Report of Chinese S&T Journals (Core Edition)
| Citation: |
QI Haixia, LAN Yubin, YANG Xiuli, ZHANG Tiemin, PENG Xiaodong. Unmanned aerial vehicle speed control simulation study based on fuzzy PI double closed loop control[J]. Journal of South China Agricultural University, 2016, 37(6): 31-37. DOI: 10.7671/j.issn.1001-411X.2016.06.005

|
Fuzzy PI closed loop control algorithm was studied for constant speed demand in agricultural unmanned aerial vehicle (UAV) operations.
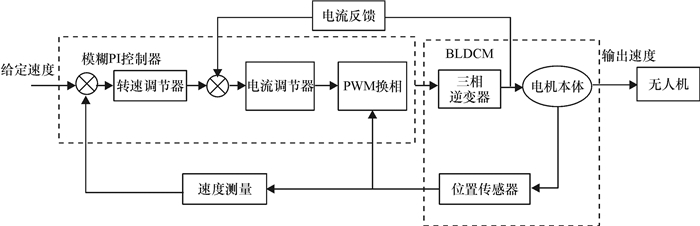
The principle and structure of the UAV electrical control system was analyzed in this paper. According to the requirement of electrical control system for brushless direct current motor (BLDCM) speed adjustment, the simulation model of BLDCM control system was established in Matlab/Simulink software environment. Double closed loop control of speed and current was applied with fuzzy PI speed control and current hysteresis control. Simulation analysis was conducted with defined systematic parameters. The ARM circuit simulation board was built to verify the effectiveness of the algorithm.
Simulation results proved that the BLDCM control system had improved response speed, reduced overshoot, and higher anti-disturbance capacity with fuzzy PI control. In addition, the dynamic behavior and robustness ability of the system were improved as well.
This study proves effectiveness of the fuzzy PI closed loop contriol algorithm and provides theoretical reference for real UAV control system design and debugging.
| [1] |
何勇, 张艳超.农用无人机现状与发展趋势[J].现代农机, 2014(1):1-5. http://d.old.wanfangdata.com.cn/Periodical/xdnj201401001
|
| [2] |
蔡红专, 牟涛, 刘静超, 等.一种农用喷洒无人机飞控系统的设计[J].农业与技术, 2015, 35(17): 41-43. http://d.old.wanfangdata.com.cn/Periodical/nyyjs201517015
|
| [3] |
张铁民, 闫国琦, 温利利, 等.我国电动力农业机械发展现状与趋势[J].农机化研究, 2012, 34(4): 236-240. http://d.old.wanfangdata.com.cn/Periodical/njhyj201204058
|
| [4] |
凌云.无人飞机在农业生产中前景无限[J].农业机械, 2013(4):81-83. http://d.old.wanfangdata.com.cn/Periodical/nyjx201310008
|
| [5] |
胡琼. 无人驾驶航空飞行器飞行控制方法研究[D]. 北京: 北京理工大学, 2015.
|
| [6] |
谷永晟, 杨建军, 朱宇虹.四旋翼无人飞行器导航控制系统研究[J].遥测遥控, 2012, 33(3):68-73. http://d.old.wanfangdata.com.cn/Periodical/ycyk201203015
|
| [7] |
朱兖植. 小型农用无人直升机飞行控制技术研究[D]. 南京: 南京航空航天大学, 2013.
|
| [8] |
李一波, 李振, 张晓东.无人机飞行控制方法研究现状与发展[J].飞行力学, 2011, 29(2): 1-9. http://d.old.wanfangdata.com.cn/Periodical/fxlx201102001
|
| [9] |
李一波, 宋述锡.基于模糊自整定PID四旋翼无人机悬停控制[J].控制工程, 2013, 20(5):910-914. http://d.old.wanfangdata.com.cn/Periodical/jczdh201305028
|
| [10] |
胡庆. 基于STM32单片机的无人机飞行控制系统设计[D]. 南京: 南京航空航天大学, 2012.
|
| [11] |
王葳, 闫国琦, 温利利, 等.我国电动力农业机械发展现状与趋势[J].农机化研究, 2012, 34(4): 236-240. http://d.old.wanfangdata.com.cn/Periodical/njhyj201204058
|
| [12] |
EDAN Y, ENGEL B A, MILES G E.Intelligent control system simulation of an agricultural robot [J]. J Intel Robot Syst, 1993, 8(2):267-284. doi: 10.1007/BF01257998
|
| [13] |
RYSZARD J, TOMAŠ B. Mechatronics recent technological and scientific advances (XIV)[M].Berlin:Springer-Verlag, 2012:795.
|
| [14] |
纪志成, 沈艳霞, 姜建国.基于Matlab无刷直流电机系统仿真建模的新方法[J].系统仿真学报, 2008, 15(2):1745-1750. http://d.old.wanfangdata.com.cn/Periodical/xtfzxb200312022
|
| [15] |
BABAEI A R. Classical and fuzzy-genetic autopilot design for unmanned aerial vehicles[J]. Appl Soft Comput, 2011, 11(1): 365-372. doi: 10.1016/j.asoc.2009.11.027
|
| [16] |
SEFER K, OMER C, OKYAY K. Fuzzy logic based approach to design of flight control and navigation tasks for autonomous unmanned aerial vehicles[J]. J Intel Robot Syst, 2009, 54(1): 229-224. https://dl.acm.org/citation.cfm?id=1466683.1466685
|
| [17] |
孙建忠, 白凤仙.特种电机及其控制[M].北京:中国水利水电出版社, 2005: 6-28.
|
| [18] |
殷云华, 郑宾, 郑浩鑫.一种基于Matlab的无刷直流电机控制系统建模仿真方法[J].系统仿真学报, 2008, 20(2): 293-298. http://d.old.wanfangdata.com.cn/Periodical/xtfzxb200802007
|
| [19] |
陈欢.直流无刷电机的建模与仿真[J].舰船电子工程, 2010, 30(2): 123-125. http://d.old.wanfangdata.com.cn/Periodical/jcdzgc201002036
|
| [20] |
张浩.基于DSP的无刷直流电机控制器设计与仿真[J].武汉理工大学学报(信息与管理工程版), 2009, 30(1): 51-54. http://d.old.wanfangdata.com.cn/Periodical/whqcgydxxb200901014
|
| [1] | XIAO Hanxiang, LI Yanfang, LING Shanfeng, ZHANG Yang, ZHANG Zhenfei, LI Yifeng, LIU Mingjing. Resistance of Nilaparvata lugens (Stål) populations to four types of insecticides in Guangdong Province[J]. Journal of South China Agricultural University, 2018, 39(2): 70-74. DOI: 10.7671/j.issn.1001-411X.2018.02.011 |
| [2] | WANG Zeping, DUAN Weixing, LI Yijie, LIANG Qiang, ZHOU Zhugui, ZHANG Muqing, LIN Shanhai. Establishment of an evaluation system for field resistance against sugarcane pokkah boeng[J]. Journal of South China Agricultural University, 2016, 37(3): 67-72. DOI: 10.7671/j.issn.1001-411X.2016.03.010 |
| [3] | CHENG Yanbo, MA Qibin, MU Yinghui, TAN Zhiyuan, WU Hong, NIAN Hai. Resistance evaluation of soybean varieties to phytophthora root rot in South China[J]. Journal of South China Agricultural University, 2015, 36(4): 69-75. DOI: 10.7671/j.issn.1001-411X.2015.04.013 |
| [4] | XIAO Wu-ming, SUN Da-yuan, ZHANG Jing-xin, WANG Hui, GUO Tao, LIU Yong-zhu, ZHU Xiao-yuan, YANG Qi-yun, CHEN Zhi-qiang. Evaluation on the Rice Blast Resistance of Three Space-Induced Rice Mutant Lines and Analysis of the Resistant Heredity[J]. Journal of South China Agricultural University, 2012, 33(3): 273-276. DOI: 10.7671/j.issn.1001-411X.2012.03.001 |
| [5] | LI Zhi-jun,LONG Wei-ping,ZHENG Jin-rong,LEI Jian-jun. In vitro Leaf Technique for the Evaluation of Pepper Resistance to Phytophthora capsici[J]. Journal of South China Agricultural University, 2007, 28(2): 47-51. DOI: 10.7671/j.issn.1001-411X.2007.02.012 |
| [6] | ZHANG Yan-rong~. Studies on techniques for evaluating the resistance in yardlong bean to fusarium wilt[J]. Journal of South China Agricultural University, 2005, 26(3): 22-25. DOI: 10.7671/j.issn.1001-411X.2005.03.006 |
| [7] | ZHAO Ying~. HPLC analysis of rice variety resistance to different biotypes of Nilaparvata lugens[J]. Journal of South China Agricultural University, 2005, 26(2): 52-55. DOI: 10.7671/j.issn.1001-411X.2005.02.013 |
| [8] | YANG Lang,LIANG Guang-wen,HE Lang-fen. Effect of methanolic extracts from susceptible and resistant rice varieties on Nilaparvata lugens (st(a)l) (Homoptera:Delphacidae)[J]. Journal of South China Agricultural University, 2004, 25(4): 118-119,122. DOI: 10.7671/j.issn.1001-411X.2004.04.031 |
| [9] | Zhang Liangyou Wu Jung-Tsung Chen Bi. INFLUENCE OF TEMPERATURE AND LIGHT ON EXPRESSION OF RESISTANCE IN RICE TO THE BROWN PLANTHOPPER, Nilnparvata lugens (Homoptera:Delphacidae)[J]. Journal of South China Agricultural University, 1990, (3): 64-70. |
| [10] | Wu Jung-Tsung Li Guanxiong Zhang Liangyou. STUDIES ON THE METHODS FOR EVALUATION OF MODERATE RESISTANCE TO THE BROWN PLANTHOPPER, NILAPARVATA LUGENS (HOMOPTERA:DELPHACIDAE) IN RICES,ORYZA SPP.[J]. Journal of South China Agricultural University, 1989, (4): 72-78. |
| 1. |
吴碧球,黄所生,李成,凌炎,黄芊,龙丽萍,黄凤宽. 抗虫品种桂育11号对褐飞虱取食、生长发育及种群增长的影响. 应用昆虫学报. 2022(05): 1059-1067 .

|
Supported by: Beijing Renhe Information Technology Co., Ltd. 
 DownLoad:
DownLoad: