- Chinese Core Journal
- Chinese Science Citation Database (CSCD) Source journal
- Journal of Citation Report of Chinese S&T Journals (Core Edition)
| Citation: |
FAN Yuanjun, MA Ruijun, HUANG Qian, HUANG Mushui, ZHANG Yali. Design and experiment of automatic feeding seedling mechanism and control system for rice pot seedlings[J]. Journal of South China Agricultural University, 2016, 37(4): 117-123. DOI: 10.7671/j.issn.1001-411X.2016.04.019

|
To improve the accuracy and reliability of automatic feeding rice seedlings in the orderly throwing transplanter, and reduce the seedling loss in the seedling feeding link.
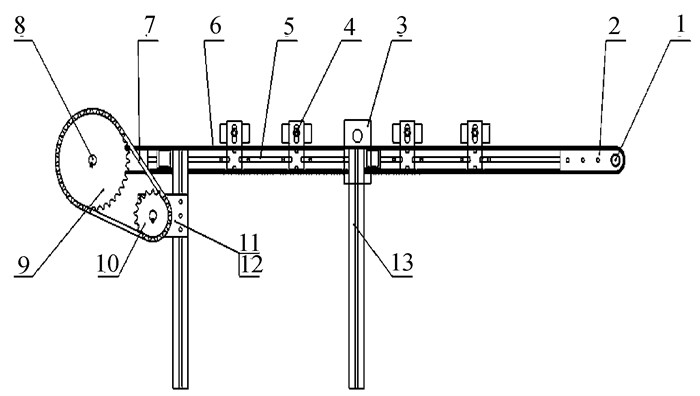
A rice seedling-row-in-position detecting scheme and its practical program method were proposed, while a belt-type automatic seedling feeding mechanism (BASFM) and related control system were developed. Through prototype test, three kinds of characteristic signals representing the plug-seedling-row-in-position status were received based on direct-on-line detection of seedling stalk, plastic tray and magnetic bulge of ferric tray respectively. The synthetical measure attribute of plug-seedling-row-in-position signal was summarized. An optimal scheme to monitor plug-seedling-row-in-position and associated control circuit was established. The BASFM with functions of detecting seedling-row, transporting and feeding seedling was designed.
When body of plastic tray was chosen as a detected target, the success-detect rate was the highest (99.78%), magnetic bulges aside ferric tray was higher (96.64%) and seedling stalk was the lowest. When plastic tray or magnetic bulge of ferric tray was chosen as a row detected target, tray type showed no significant effect on success-detect rate, but significant while seedling stalk was chosen as a row detected target. For three seedling-row-in-position detecting schemes, the variance of transport motor speed also showed no significant impact on the seedling-row-in-position detecting performance between 30-60 r·min-1.
This design of BASFM and affiliated seedling-row-in-position automatic detecting and control system can meet the performance requirements for pot-seedling-row transporting and feeding in the rice seedling orderly throwing transplanter.
| [1] |
周海波, 马旭, 姚亚利.水稻秧盘育秧播种技术与装备的研究现状及发展趋势[J].农业工程学报, 2008, 24(4):301-306. doi: 10.3321/j.issn:1002-6819.2008.04.060
|
| [2] |
闫凤宇, 于凤阁.水稻抛秧应用现状及技术要点[J].现代农业科技, 2011(3):99. doi: 10.3969/j.issn.1007-5739.2011.03.054
|
| [3] |
马瑞峻, 区颖刚, 王玉兴, 等.穴盘水稻秧苗机械抛栽的农艺要求[J].华中农业大学学报, 2003, 22(1):55-59. doi: 10.3321/j.issn:1000-2421.2003.01.013
|
| [4] |
张冬梅, 汪春.水稻钵育机械化栽培技术研究现状及发展趋势[J].长春理工大学学报(高教版), 2009, 4(7):175-176. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK200902481286
|
| [5] |
夏俊芳, 王树才, 许绮川.水稻抛秧机械的现状与发展趋势[J].农业机械, 2001(11):35-36. http://d.old.wanfangdata.com.cn/Periodical/nyjx200111016
|
| [6] |
李建桥, 张国凤, 陈建能, 等.钵苗有序移栽机构的研究进展及应用展望[J].农机化研究, 2008(2):1-5. doi: 10.3969/j.issn.1003-188X.2008.02.001
|
| [7] |
杨坚, 阳潮声, 陈兆耀, 等.2ZB-8电磁振动式小型水稻钵苗移栽机的研究[J].农业工程学报, 2002, 18(6):84-87. doi: 10.3321/j.issn:1002-6819.2002.06.022
|
| [8] |
陈风. 钵苗移栽机输送、分苗系统的研究[D]. 石河子: 石河子大学, 2005.
|
| [9] |
陈恒高, 宋来田, 田金和, 等.水稻机制钵苗抛秧机的研究[J].农业机械学报, 1996, 27(3):47-51. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK199600778246
|
| [10] |
陈恒高, 田金和, 宋来田, 等.机械手式水稻抛秧机的研究[J].农业机械学报, 1998, 29(3):48-52. http://d.old.wanfangdata.com.cn/Periodical/nyjxxb199803010
|
| [11] |
王瑞丽, 李宝筏.水稻钵苗有序移栽试验装置的研究[J].农机化研究, 2007(9):116-118. doi: 10.3969/j.issn.1003-188X.2007.09.036
|
| [12] |
原新斌, 张国凤, 陈建能, 等.顶出式水稻钵苗有序移栽机的研究[J].浙江理工大学学报, 2011, 28(5):749-752. doi: 10.3969/j.issn.1673-3851.2011.05.020
|
| [13] |
韩长杰, 杨宛章, 张学军, 等.穴盘苗移栽机自动取喂系统的设计与试验[J].农业工程学报, 2013, 29(8):51-61. http://d.old.wanfangdata.com.cn/Periodical/nygcxb201308008
|
| [14] |
包春江, 李宝筏, 包文育, 等.水稻钵苗空气整根气吸式有序移栽机的研究[J].农业工程学报, 2003, 19(6):130-134. doi: 10.3321/j.issn:1002-6819.2003.06.031
|
| [15] |
高英武, 任述光, 汤兴初, 等.步进式水稻钵苗摆植机送秧机构的研究[J].农业机械学报, 2003, 34(2):37-39. doi: 10.3969/j.issn.1000-1298.2003.02.012
|
| [16] |
杜立恒, 俞高红, 张国凤, 等.高速插秧机钵体毯状苗纵向送秧装置的设计与试验[J].农业工程学报, 2014, 30(14):17-25. doi: 10.3969/j.issn.1002-6819.2014.14.003
|
| [17] |
成永芳.日本RX-6型水稻钵苗移栽机引进试验简报[J].粮油加工与食品机械, 1999(3):28-32. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK199901027111
|
| [18] |
KUMAR G V P, RAHEMAN H. Automatic feeding mechanism of a vegetable transplanter[J]. IJABE, 2012, 5(2): 20-27. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=nygcxb201715003
|
| [19] |
SATPATHY S K, GARG I K. Effect of selected parameters on the performance of a semi-automatic vegetable transplanter[J]. AMA-Agr Mech Asia, Af, 2008, 39(2): 47-51. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=JJ026464972
|
| [20] |
吴俭敏, 颜华, 金鑫, 等.移栽机送盘装置与定位控制系统研究[J].农业机械学报, 2013, 44(S1):14-18. http://d.old.wanfangdata.com.cn/Periodical/nyjxxb2013z1003
|
| [21] |
田素博, 王荣华, 邱立春.温室穴盘苗自动移栽输送系统设计[J].沈阳农业大学学报, 2009, 40(5):620-622. doi: 10.3969/j.issn.1000-1700.2009.05.023
|
| [22] |
RYU K H, KIM G, HAN J S. AE:Automation and emerging technologies: Development of a robotic transplanter for bedding plants[J]. J Agr Eng Res, 2001, 78(2): 141-146. http://d.old.wanfangdata.com.cn/Periodical/zgnykx200106002
|
| [23] |
马瑞峻, 区颖刚, 赵祚喜, 等.水稻钵苗机械手取秧有序移栽机的改进[J].农业工程学报, 2003, 19(1):113-116. doi: 10.3321/j.issn:1002-6819.2003.01.029
|
| [24] |
汤平波.单片机系统的电平转换技术[J].计算技术与自动化, 1996, 15(4):71-74. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK199600296635
|
| [25] |
郞春, 郎小飞, 郎明飞. 水稻钵体育苗摆栽机专用育秧盘: CN200920099436. 5[P]. 2010-03-03.
|
| [26] |
张小鸣.单片机系统设计与开发[M].北京:清华大学出版社, 2014.
|
| [27] |
王幸之, 王雷, 钟爱琴, 等.单片机应用系统电磁干扰与抗干扰技术[M].北京:北京航空航天大学出版社, 2006.
|
| [28] |
顾永红.综述单片机应用系统的抗干扰设计[J].计算机自动测量与控制, 2000, 8(1):51-53. http://d.old.wanfangdata.com.cn/Periodical/jsjzdclykz200001018
|
| [29] |
秦臻, 田宏伟.单片机应用系统电磁干扰技术研究[J].机械管理开发, 2011(5): 67-68. doi: 10.3969/j.issn.1003-773X.2011.05.035
|
Supported by: Beijing Renhe Information Technology Co., Ltd. 
 DownLoad:
DownLoad: