
Wheel steering angle measurement method of agricultural machinery based on GNSS heading differential and MEMS gyroscope
-
摘要:目的
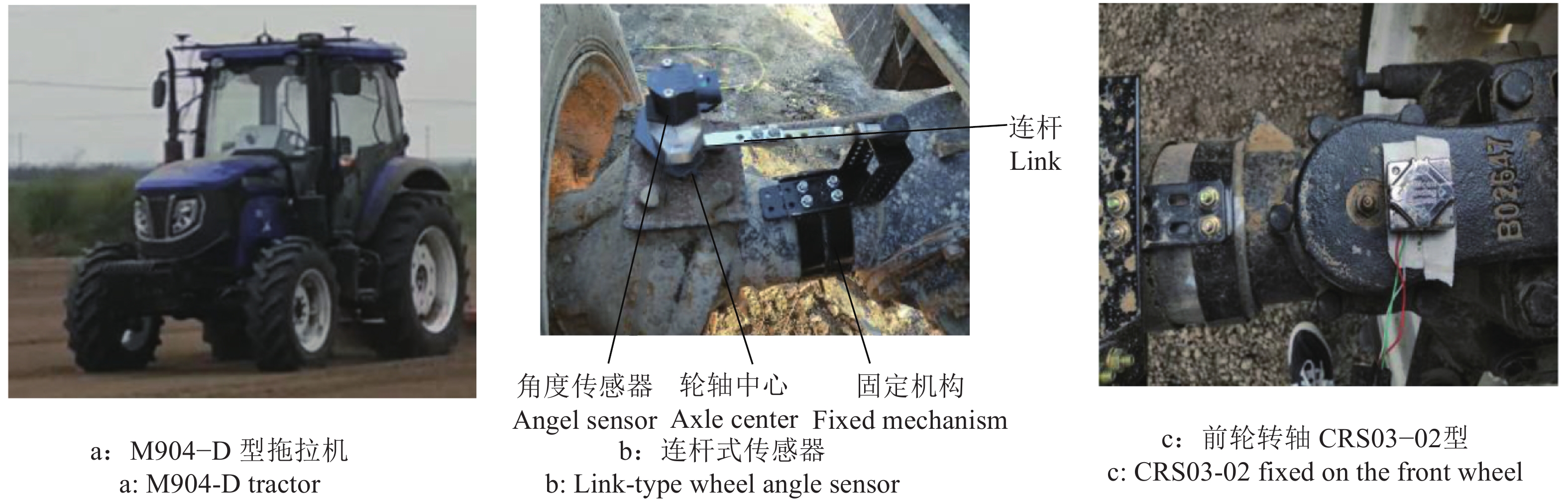
设计一种农机前轮转角测量方法,代替安装复杂的连杆式轮角传感器。
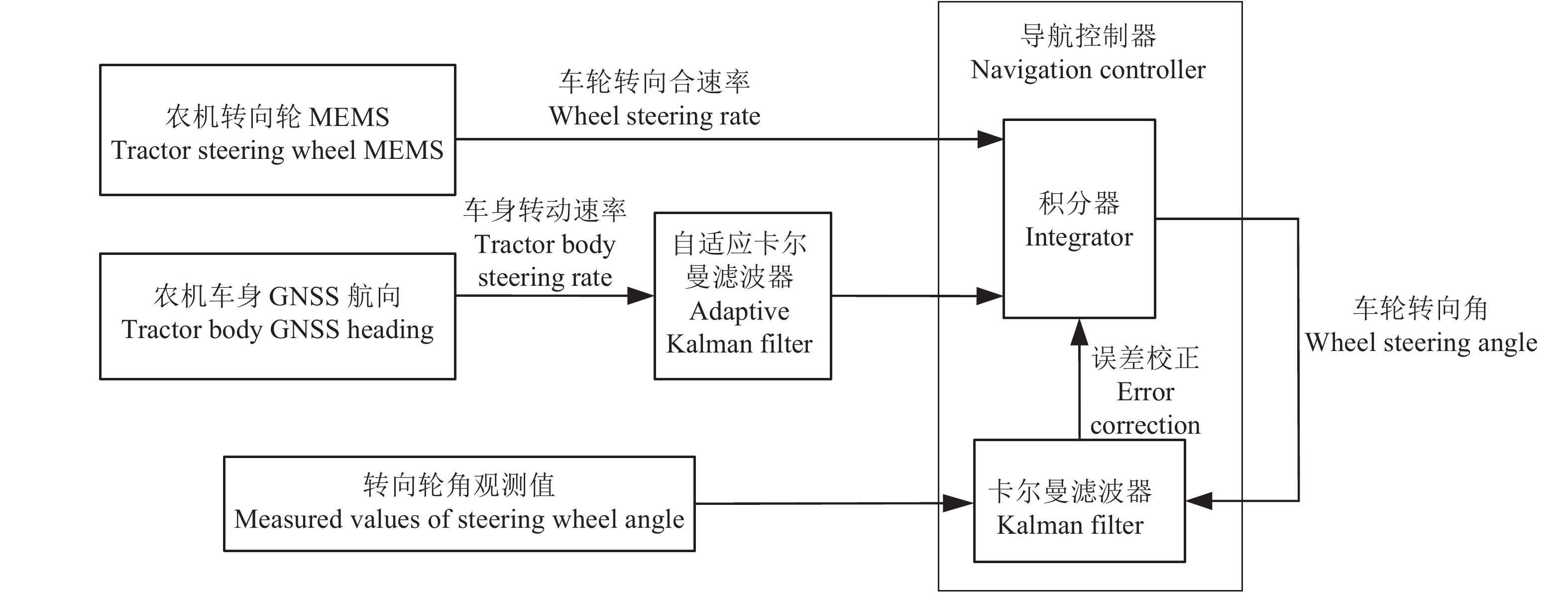
方法采用GNSS天线测量航向和速度,MEMS陀螺仪测量车身和车轮的合转动速率,计算MEMS陀螺仪与GNSS航向微分差值,获得车轮转动速率;设计自适应卡尔曼滤波器进行信息融合和校正,获得车轮转向角,并进行性能验证和田间应用试验。
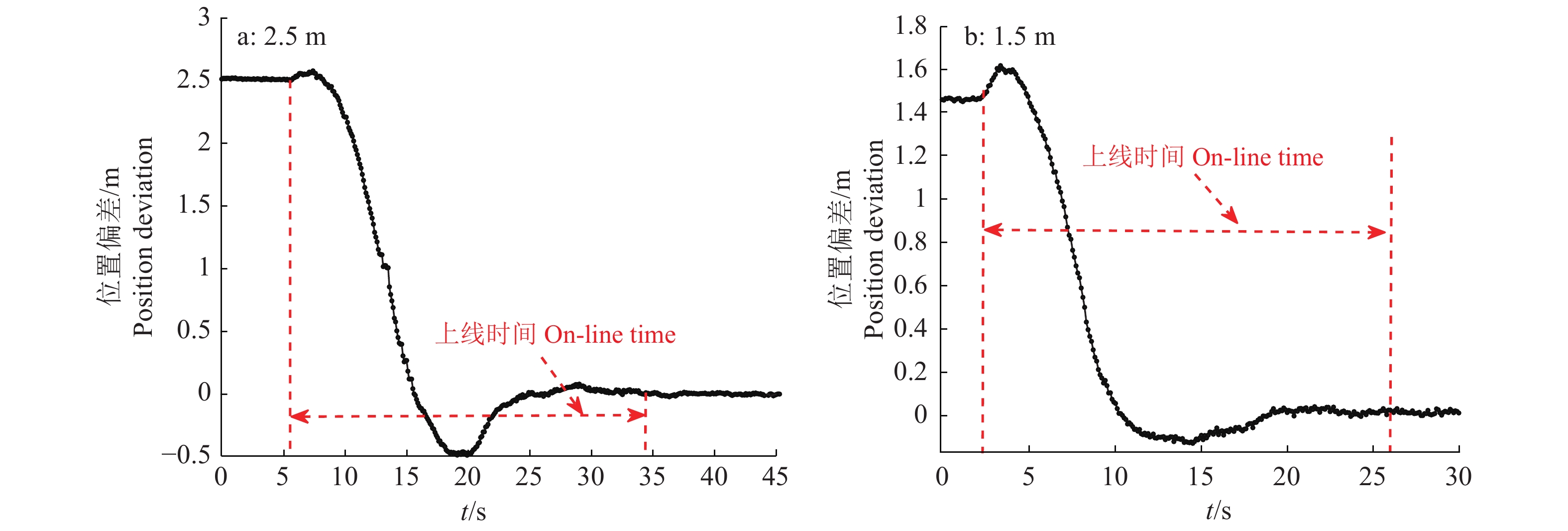
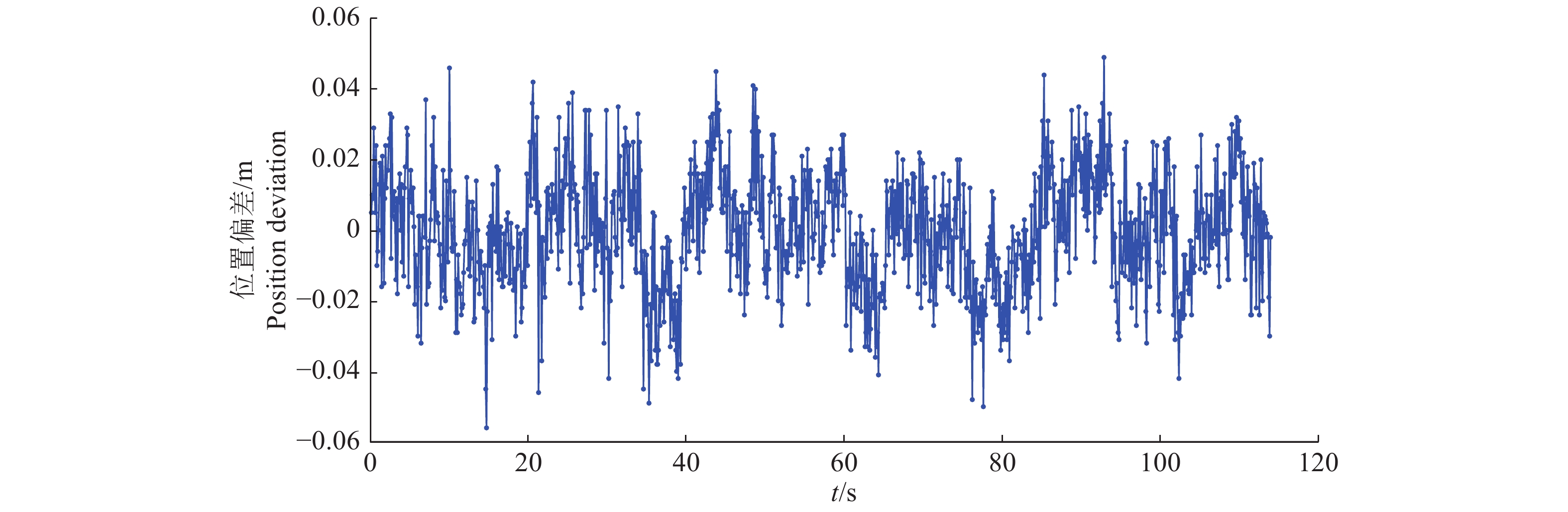
结果与连杆式轮角传感器测量结果对比,轮角测量方法的拖拉机在偏离航线2.5和1.5 m进行上线时,平均绝对误差(MAE)分别为1.13°和0.87°,均方根误差(RMSE)分别为0.90° 和0.68°,上线时间分别为29.4和23.5 s;以4 km/h田间导航应用时,MAE为0.44°,RMSE为0.87°,满足拖拉机旱地作业要求。
结论GNSS航向微分和MEMS陀螺仪轮角测量方法与连杆式轮角传感器测量性能相当,能够替代轮角传感器用于较低速农业机械导航。
Abstract:ObjectiveTo replace the link-type wheel angle sensor which is complicated to install, a method for measuring the front wheel angle of agricultural machinery was designed.
MethodGNSS antenna was used to measure the course and speed information, and MEMS gyroscope was used to measure the combined rotation speed of the tractor body and wheel. The differential difference between MEMS gyroscope and GNSS heading was calculated to obtain the wheel rotation rate. The self-adaptive Kalman filter was designed to fuse and correct the information, and wheel steering angle was obtained. Performance verification and field application test were conducted.
ResultThe performance of the wheel angle measurement method designed in this paper was verified by comparing its measurement result with that of the link-type wheel angle sensor. When the course deviations of the tractor were 2.5 and 1.5 m respectively, the mean absolute errors (MAE) of the new measurement method were 1.13° and 0.87° respectively, the root mean square errors (RMSE) were 0.90° and 0.68° respectively, and the on-line times were 29.4 and 23.5 s respectively. When the method was used with the tractor navigating at the speed of 4 km/h in the field, the MAE was 0.44°, and the RMSE was 0.87°, which could meet the requirements of tractor operation on dry land.
ConclusionThe measurement method based on GNSS heading differential and MEMS gyroscope has equivalent measurement performance with the link-type wheel angle sensor. This measurement method can be used to replace wheel angle sensor for the navigation of low speed agricultural machinery.
-
-
![]()
图 2 基于GNSS航向和MEMS陀螺仪轮角测量方法
Figure 2. Wheel angle measurement method based on GNSS heading and MEMS
![]()
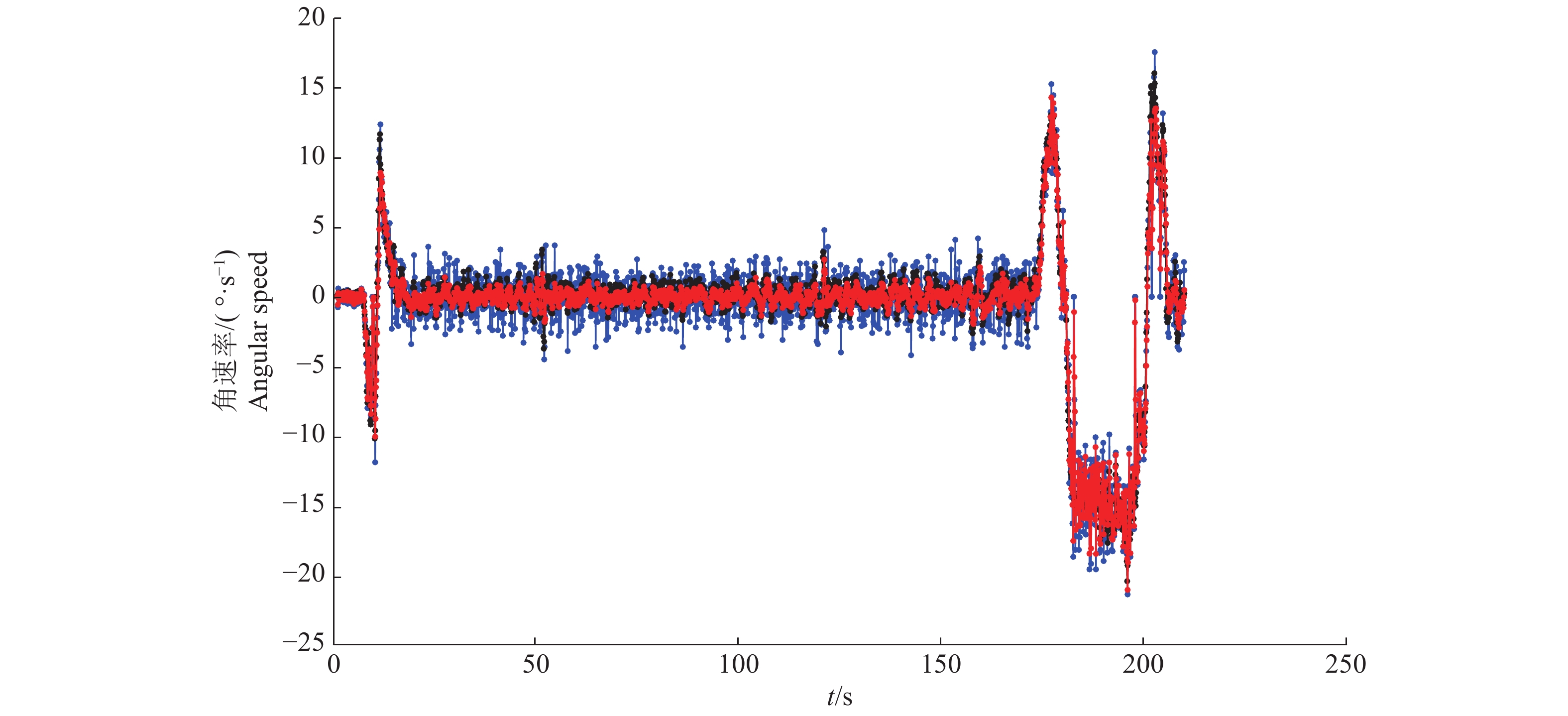
图 3 GNSS航向微分计算值(蓝线)、车身MEMS陀螺仪测量值(黑线)和自适应卡尔曼滤波(红线)对比
Figure 3. Comparison of the calculated values of GNSS heading differential (bule line), measured values of MEMS gyroscope(black line) and self-adaptive Kalman filter (red line)
![]()
图 4 不同上线距离前轮转向角度观测值(红线)、滤波值(黑线)和角度传感器测量值(蓝线)对比
Figure 4. Comparison of observed (red line) and filter values (black line) of front wheel steering angle and measured values of angle sensor (blue line) at different on-line distances
![]()
图 5 不同上线距离GNSS航向微分和MEMS陀螺仪测量转向轮角导航时的上线时间
Figure 5. On-line time at different on-line distances when measuring steering wheel angle with GNSS heading differential and MEMS gyroscope
![]()
图 6 不同上线距离角度传感器测量转向轮角导航时的上线时间
Figure 6. On-line time at different on-line distances when measuring steering wheel angle with angle sensor
![]()
图 7 田间试验中前轮转向角观测值(红线)、滤波值(黑线)和角度传感器测量值(蓝线)对比图
Figure 7. Comparison chart of observed (red line) and filtered values (black line) of front wheel steering angle and measured values of angle sensor (blue line) in field experiment
![]()
图 8 拖拉机直线导航作业时横向位置偏差
Figure 8. Deviation of lateral position during linear navigation operation of tractor
表 1 GNSS双天线航向微分滤波前后误差
Table 1 Errors of GNSS dual antenna heading differential values before and after Kalman filtering
处理
Process最大误差/(°/s)
Maximum error平均绝对误差/(°/s)
Mean absolute error均方根误差/(°/s)
Root mean square error滤波前
Before filtering直线行驶 1 Straight driving 1 3.88 0.94 1.17 直线行驶 2 Straight driving 2 5.40 0.92 1.21 直线行驶 3 Straight driving 3 3.93 0.87 1.09 曲线行驶 1 Curve driving 1 15.05 1.69 2.75 曲线行驶 2 Curve driving 2 18.00 1.40 2.61 曲线行驶 3 Curve driving 3 10.35 1.63 2.48 滤波后
After filtering直线行驶 1 Straight driving 1 3.07 0.51 0.65 直线行驶 2 Straight driving 2 4.14 0.60 0.80 直线行驶 3 Straight driving 3 2.99 0.66 0.85 曲线行驶 1 Curve driving 1 9.32 1.45 2.12 曲线行驶 2 Curve driving 2 15.69 1.23 2.34 曲线行驶 3 Curve driving 3 7.64 1.45 2.11  下载: 导出CSV
下载: 导出CSV
表 2 滤波前后角度值与连杆传感器输出值对比的统计数据
Table 2 Statistics of angle values before and after filtering compared to the output values of link-type angle sensor
上线距离/m
On-line distance处理
Process最大误差/(°)
Maximum error平均绝对误差/(°)
Mean absolute error均方根误差/(°)
Root mean square error2.5 滤波前 Before filtering 17.30 2.66 3.48 滤波后 After filtering 5.04 1.13 0.90 1.5 滤波前 Before filtering 11.26 1.98 2.89 滤波后 After filtering 4.32 0.87 0.68
下载: 导出CSV
-
[1] 王辉, 王桂民, 罗锡文, 等. 基于预瞄追踪模型的农机导航路径跟踪控制方法[J]. 农业工程学报, 2019, 35(4): 11-19. doi: 10.11975/j.issn.1002-6819.2019.04.002 [2] 张智刚, 王进, 朱金光, 等. 我国农业机械自动驾驶系统研究进展[J]. 农业工程技术, 2018, 38(18): 23-27. [3] 胡静涛, 高雷, 白晓平, 等. 农业机械自动导航技术研究进展[J]. 农业工程学报, 2015, 31(10): 1-10. doi: 10.11975/j.issn.1002-6819.2015.10.001 [4] 王朝阳. 基于陀螺仪的车辆前轮转角测量方法研究[D]. 上海: 上海工程技术大学, 2016. [5] 缪存孝, 楚焕鑫, 孙志辉, 等. 基于双GNSS天线及单陀螺的车轮转角测量系统[J]. 农业机械学报, 2017, 48(9): 17-23. doi: 10.6041/j.issn.1000-1298.2017.09.002 [6] 王鹤, 胡静涛, 高雷, 等. 农业机械自动导航车轮转角测量误差补偿模型[J]. 农业机械学报, 2014, 45(8): 33-37. doi: 10.6041/j.issn.1000-1298.2014.08.006 [7] YIN X, NOGUCHI N. Development and evaluation of a general-purpose electric off-road robot based on agricultural navigation[J]. Int J Agr Biol Eng, 2014, 7(5): 14-21.
[8] HU J, LI T. Cascaded navigation control for agricultural vehicles tracking straight paths[J]. Int J Agr Biol Eng, 2014, 7(1): 36-44.
[9] 胡书鹏, 尚业华, 刘卉, 等. 拖拉机转向轮转角位移式和四连杆式间接测量方法对比试验[J]. 农业工程学报, 2017, 33(4): 76-82. doi: 10.11975/j.issn.1002-6819.2017.04.011 [10] YIN X, DU J, NOGUCHI N, et al. Development of autonomous navigation system for rice transplanter[J]. Int J Agr Biol Eng, 2018, 11(6): 89-94.
[11] 张智刚, 罗锡文, 李俊岭. 轮式农业机械自动转向控制系统研究[J]. 农业工程学报, 2005, 21(11): 77-80. doi: 10.3321/j.issn:1002-6819.2005.11.017 [12] NAGASAKA Y, SAITO H, TAMAKI K, et al. An autonomous rice transplanter guided by global positioning system and inertial measurement unit[J]. J Field Robot, 2009, 26(6/7): 537-548. doi: 10.1002/rob.20294
[13] 吴鹏, 李东京, 贠超. 一种惯性传感器与编码器相结合的AGV航迹推算系统[J]. 机电工程, 2018, 35(3): 310-316. doi: 10.3969/j.issn.1001-4551.2018.03.019 [14] 刘兆朋, 张智刚, 罗锡文, 等. 雷沃ZP9500高地隙喷雾机的GNSS自动导航作业系统设计[J]. 农业工程学报, 2018, 34(1): 15-21. doi: 10.11975/j.issn.1002-6819.2018.01.03 [15] 何杰, 朱金光, 罗锡文, 等. 基于电动方向盘的插秧机转向控制系统设计[J]. 农业工程学报, 2019, 35(6): 10-17. doi: 10.11975/j.issn.1002-6819.2019.06.002 [16] 连志鹏. 自动驾驶农机转向控制研究[D]. 上海: 上海工程技术大学, 2015. [17] BREWER D E, WHITE G W, PEAKEJ W. Vehicle gyro based steering assembly angle and angular rate sensor: 20070088477[P]. 2007-04-19.
[18] 布里维D E, 怀特G W, 派科J W. 基于转向组件角度及角速率传感器的车辆陀螺仪: 101326094 B[P]. 2008-12-17. [19] 吴晓鹏, 赵祚喜, 张智刚, 等. 东方红拖拉机自动转向控制系统设计[J]. 农业机械学报, 2009, 40(S1): 1-5. [20] 张立新, 陈佳俊. MSP430与TMR的智能磁敏角度传感器设计[J]. 单片机与嵌入式系统应用, 2019, 19(9): 62-65.



计量
- 文章访问数: 1969
- HTML全文浏览量: 6
- PDF下载量: 2031
