
Turning mode and whole region-coverage path planning and optimization of agricultural small UAV
-
摘要:目的
具备自主飞行、航线规划与优化、精准控制与变量作业能力是农用小型无人机(Agricultural small unmanned aerial vehicle, ASUAV)的发展方向。本研究为ASUAV在全区域覆盖下自主飞行作业前的航线拐点坐标解算、飞行航向、起降点位置以及转弯掉头模式等提供优化选择。
方法利用基于自主恒速飞行和最小转弯半径约束的无人机转弯掉头策略,分析并设计了任意凸多边形作业区域下无人机的路径规划方法,提出了基于幅宽微变的航线归整法路径规划方案,并对结构化农田区域实现全区域覆盖条件下的路径进行了规划与优化选择。
结果基于最优转弯掉头模式下的ASUAV全区域覆盖路径规划方法适用于任意凸多边形结构的农田区域,GUI程序在解算地头边界航线拐点坐标的同时能优化选择出效率最高的飞行作业航线。在试验田随机规划出一个面积约为2.7 hm2的不规则凸六边形田块,仿真发现当无人机沿着平行于最长边飞行作业时,其空行行程最短,约为540 m,工作效率也最高,接近90%。
结论经过优化选择后的ASUAV掉头转弯模式、起降点位置、飞行航向以及解算后航线拐点坐标等可以实现全区域覆盖,研究结果为ASUAV自主飞行作业提供了参考。
Abstract:ObjectiveThe development trend of agricultural small UAV (ASUAV) is having a capability with autonomous flight, working route planning and optimization, precise control and variable operation. This study provides the optimized selection of flight heading, take-off and landing location, turning mode and flight point coordinate solution for ASUAV before autonomous flight operation under the condition of whole-area coverage.
MethodTurning mode strategy of ASUAV was studied based on autonomous flight at constant speed under constraint of the minimum turning radius. The path planning method under arbitrary convex polygons was analyzed and designed. An integerized route planning scheme was proposed based on the slight change of working width. Path planning and optimal selection under the condition of whole region-coverage were achieved in the structured farmland area.
ResultThe whole-area coverage path planning method based on the optimal turning mode of ASUAV was applicable to the farmland with arbitrary convex polygon structure. GUI program could optimize flight route with the highest efficiency while calculating flight point coordinates of ground boundary. An irregular convex hexagonal field with an area of about 2.7 hm2 was randomly planned in the field. The simulation results showed that when ASUAV was flying parallel to the longest side of the field, the invalid distance was the shortest with about 540 m, and the efficiency was the highest which was close to 90%.
ConclusionThe optimized turning mode, take-off and landing location, flight heading and route inflection point coordinates can realize the full area coverage. This result can provide a reference for ASUAV autonomous flight operation.
-
Keywords:
- agricultural UAV /
- turn /
- path planning and optimization /
- whole region-coverage /
- flight operation
-
对机器人来讲,路径规划一是要实现最基本的“点到点”路线规划功能,二是要实现作业区域的全覆盖,在避开障碍物的同时要求行程尽可能短、遗漏和重复的路径尽可能少[1-3]。农用小型无人机(Unmanned aerial vehicle, UAV)属于农业机器人范畴,但其航迹规划与机器人路径规划有所区别:主要表现在无人机飞行过程中不会出现直角转弯,无人机转弯时有最小转弯半径约束,且受无人机高度、俯仰角、偏航角的影响[4]。考虑到农用小型UAV续航时间有限且作业场所相对简单和固定,对其进行路径规划时避障和回避威胁往往不是首要考虑的问题,重点考虑的应是如何提高作业效率、实现无遗漏无重复地全区域覆盖[5-7]。UAV在作业(喷施、播种、喷撒、辅助授粉等)时的行程可分为工作行程和空行行程2个部分。工作行程是无人机在作业区域上作业时所经过的路径,此外皆为空行行程。空行行程主要出现在3个地方:一是从起降点飞行至起始作业点;二是在航线更替需要转弯掉头时候所必需的路程;最后是从作业结束点回到起降点这段距离。其中,航线更替转弯掉头时所产生的空驶路程是产生空行行程的主要原因。空行行程会产生额外的时间消耗及能量消耗,这种消耗是影响作业效率的重要因素,合理的路径规划及无人机转弯掉头策略能有效降低空行行程距离[8]。本文以农用小型UAV为对象,通过坐标转换、数值解算、变幅宽航线归整等方法,研究农用小型UAV在恒速自主飞行条件下的最优转弯掉头策略,以及任意凸多边形作业区域下的路径全覆盖规划方法。为农用小型UAV在自主飞行作业前航线拐点坐标解算、起降点位置和飞行航向选择以及掉头转弯模式选择等提供航线规划与优化依据。
1. 农用小型UAV转弯掉头模式
地面农业机械的轮间距通常是固定的,因此其对应的最小转弯半径(R)也是固定的,农业机械的掉头转弯模式取决于R与作业幅宽(w)的关系。常见的转弯掉头策略主要有半圆形转弯、弓形转弯、梨形转弯以及鱼尾形转弯等几种[9-12]。对UAV而言,在遥控、自主飞行中都可通过侧向平移倒飞来实现航线更替,但在遥控模式下难以实现恒速飞行作业[13]。自主作业虽然在直线飞行时能实现恒速飞行,但在接近田间地头时也要降低速度来实现转弯和航线变更[14]。本文探讨农用小型UAV在自主飞行模式下以恒速飞行实现作业航线更替的最优转弯掉头策略。
不同于地面农业机械,农用小型UAV的R不是固定的,其大小与飞机的姿态、速率有关,为简化分析,本文假定R为理想的常数。UAV采用哪种转弯方式也取决于R与w的关系,这与地面农业机械相似。本文设
$\theta $ 为UAV飞行航线同地头边界的夹角,取值范围为$0 < \theta \leqslant {{\rm{\pi }} / 2}$ ,令$\theta {\rm{ = }}{\theta _0}{\rm{ = }}\arcsin \left( {\displaystyle\frac{w}{{2R}}} \right)$ 为特征夹角。根据R、w、θ与θ0的大小关系,有如下几种理想转弯模式。1.1 当R≤w/2时
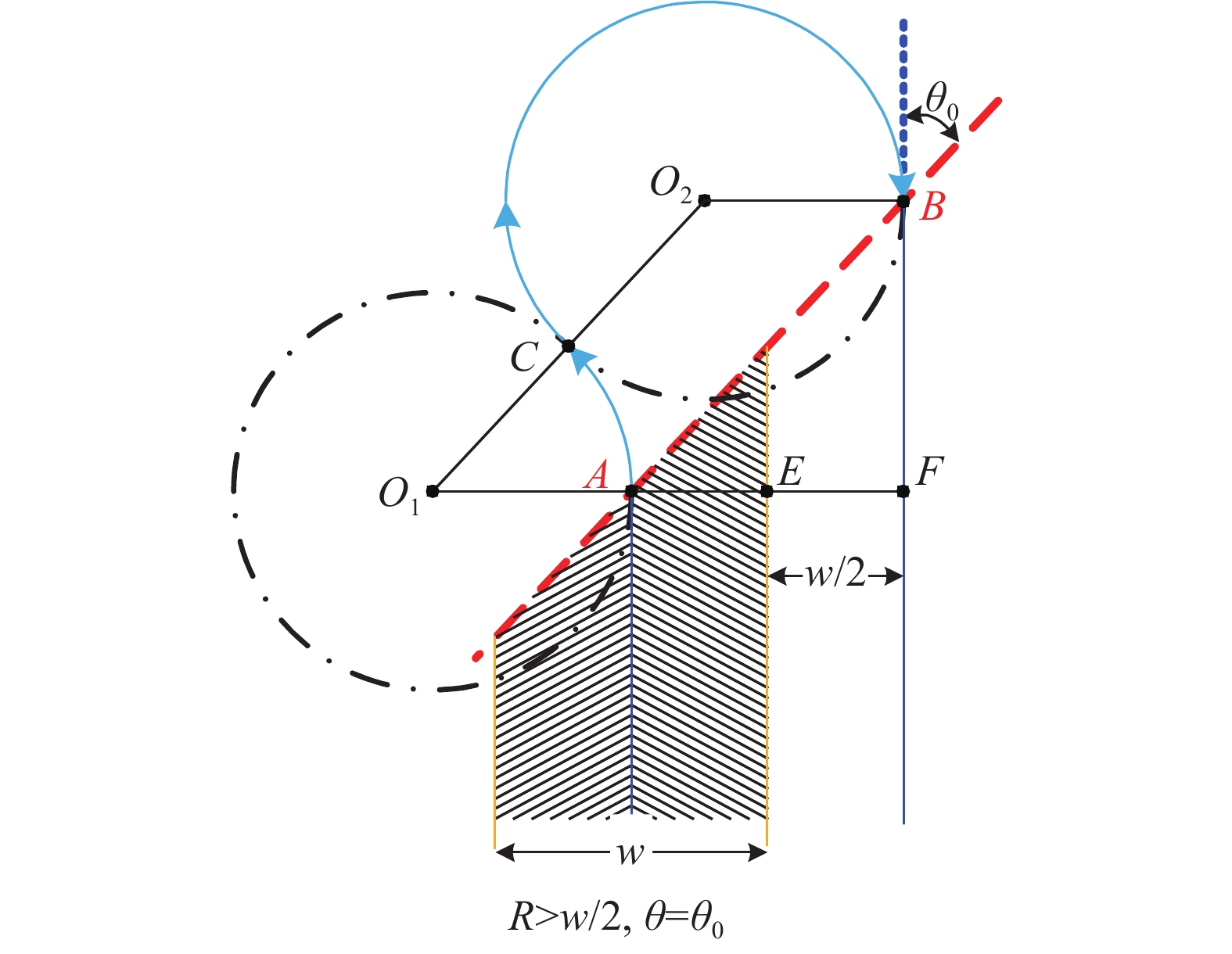
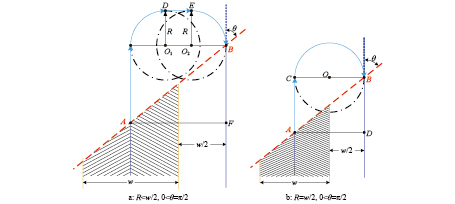
农用小型UAV的转弯半径(R)小于或等于作业半幅宽(w/2)时的理想转弯掉头路径见图1。UAV从A点离开作业田块完成上一次航线作业,经过转弯掉头后重新从B点进入作业田块,实现航线更替。浅蓝色实线表示理论上飞机完成转弯掉头所走过的最短行程,即是空行行程。
UAV的w、R和夹角(θ)在飞行作业前都是已知量,由图1a可计算出空行行程距离(l1)为:
$${l_1} = w \left( {1 + \frac{1}{{\tan \theta }}} \right) + ({\rm{\pi }} - 2)R,$$ (1) 由图1b可计算出空行行程距离(l2)为:
$${l_2} = \frac{w}{{\tan \theta }} + {\rm{\pi }}R{\text{。}}$$ (2) 1.2 当R>w/2时
当UAV的转弯半径R大于作业半幅宽w/2时,情况稍复杂,可根据航线与地头边界直线夹角(θ)的临界值(θ0)的关系分为如下3种情况:
1) 当θ=θ0时,只有1种转弯掉头情况,如图2所示。可解出空行行程距离(l3)为:
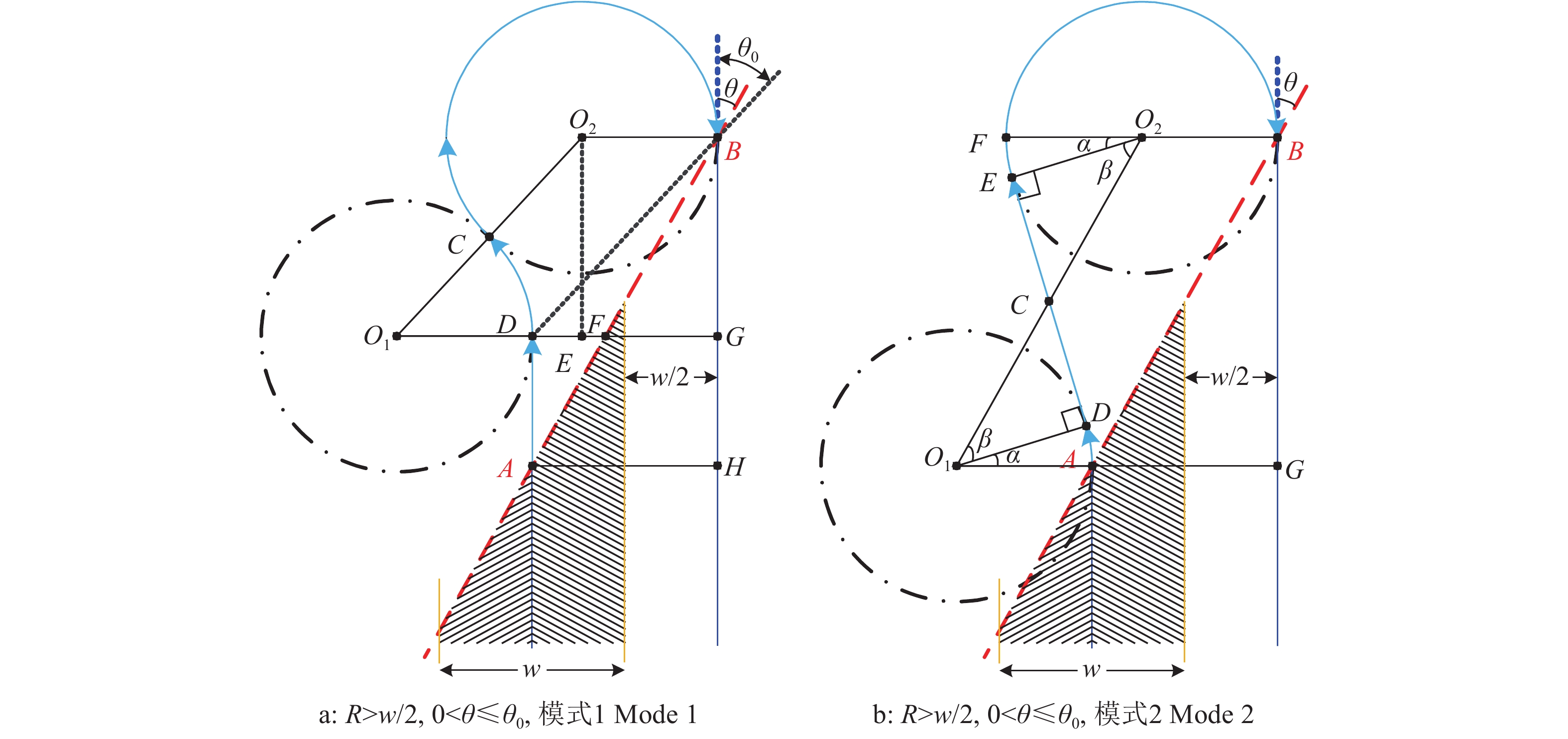
$${l_3} = 2R({\rm{\pi }} - {\theta _0}){\text{。}}$$ (3) 2) 0<θ≤θ0 时,有2种转弯掉头情况,如图3所示。
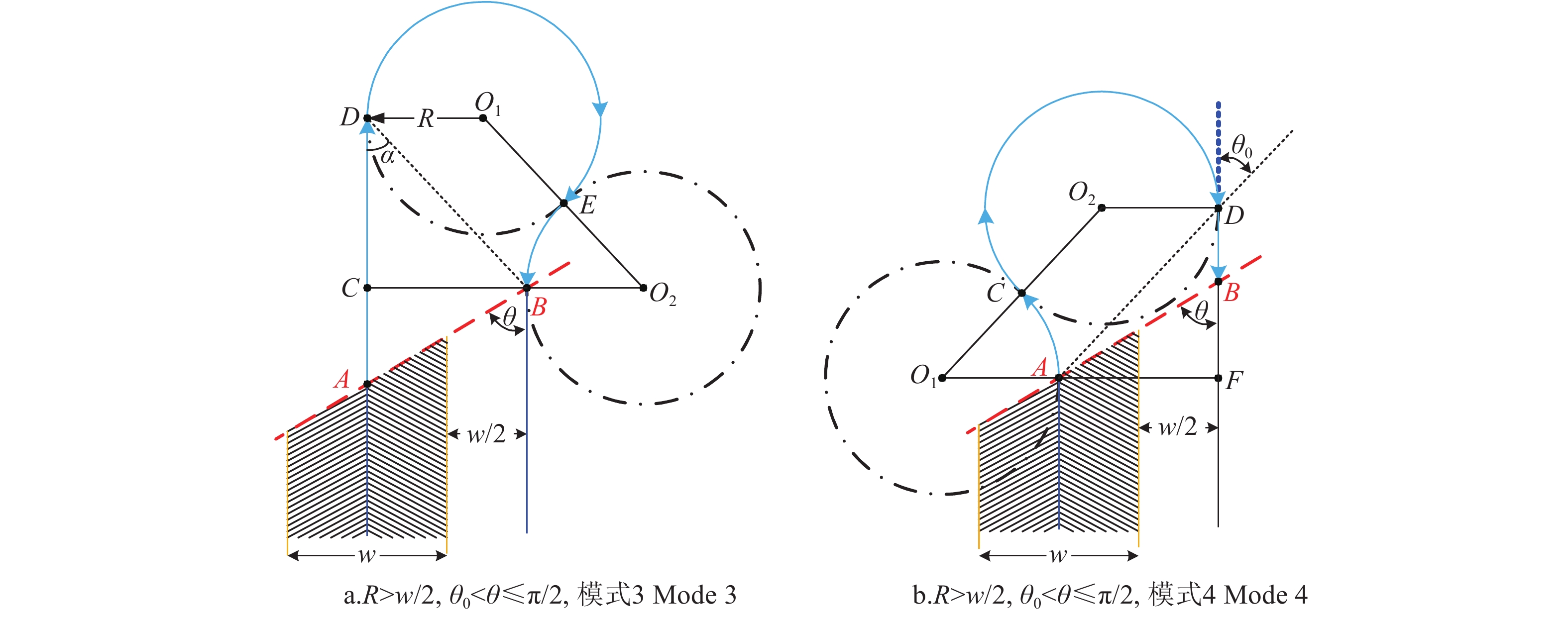
$${l_4} = w\left( {\frac{1}{{\tan \theta }} - \frac{1}{{\tan {\theta _0}}}} \right) + 2R({\rm{\pi }} - {\theta _0}),$$ (4) $${l_5}{\rm{ = }}2R\left( {{\rm{\pi }} - \theta - {\rm{ta}}{{\rm{n}}^{{\rm{ - }}1}}\left( {\sqrt {\frac{{{{\sin }^2}{\theta _0}}}{{{{\sin }^2}\theta }} - 1} } \right)} \right){\rm{ + }}2\sqrt {\frac{{{w^2}}}{{4{{\sin }^2}\theta }} - {R^2}} {\text{。}}$$ (5) 3) θ0<θ≤π/2时,有2种转弯掉头情况,如图4所示。
$${l_6} = w\left( {\frac{1}{{\tan \theta }}{\rm{ + }}\frac{1}{{\tan {\theta _0}}}} \right) + 2R({\rm{\pi }} - {\theta _0}),$$ (6) $${l_7} = w \left( {\frac{1}{{\tan {\theta _0}}} - \frac{1}{{\tan \theta }}} \right) + 2R ({\rm{\pi }} - {\theta _0}){\text{。}}$$ (7) 将式(1)~(7)分别对R求导,可得:
$${\left. {\frac{{d{l_i}}}{{dR}}} \right|_{i = 1 \sim 7}} > 0{\text{。}}$$ (8) 因此,无论采用何种转弯模式,当UAV以最小转弯半径飞行时,空行行程最短,同时,经解算[8]可得,当R>w/2时:若0<θ≤θ0,则l5<l4;若θ0<θ≤π/2,则l7<l6。
2. 区域全覆盖作业路径规划
2.1 任意凸多边形作业区域
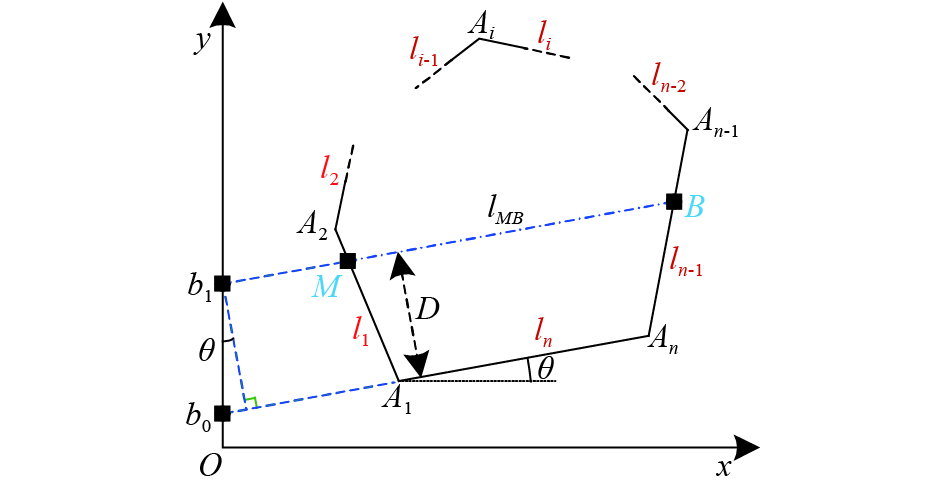
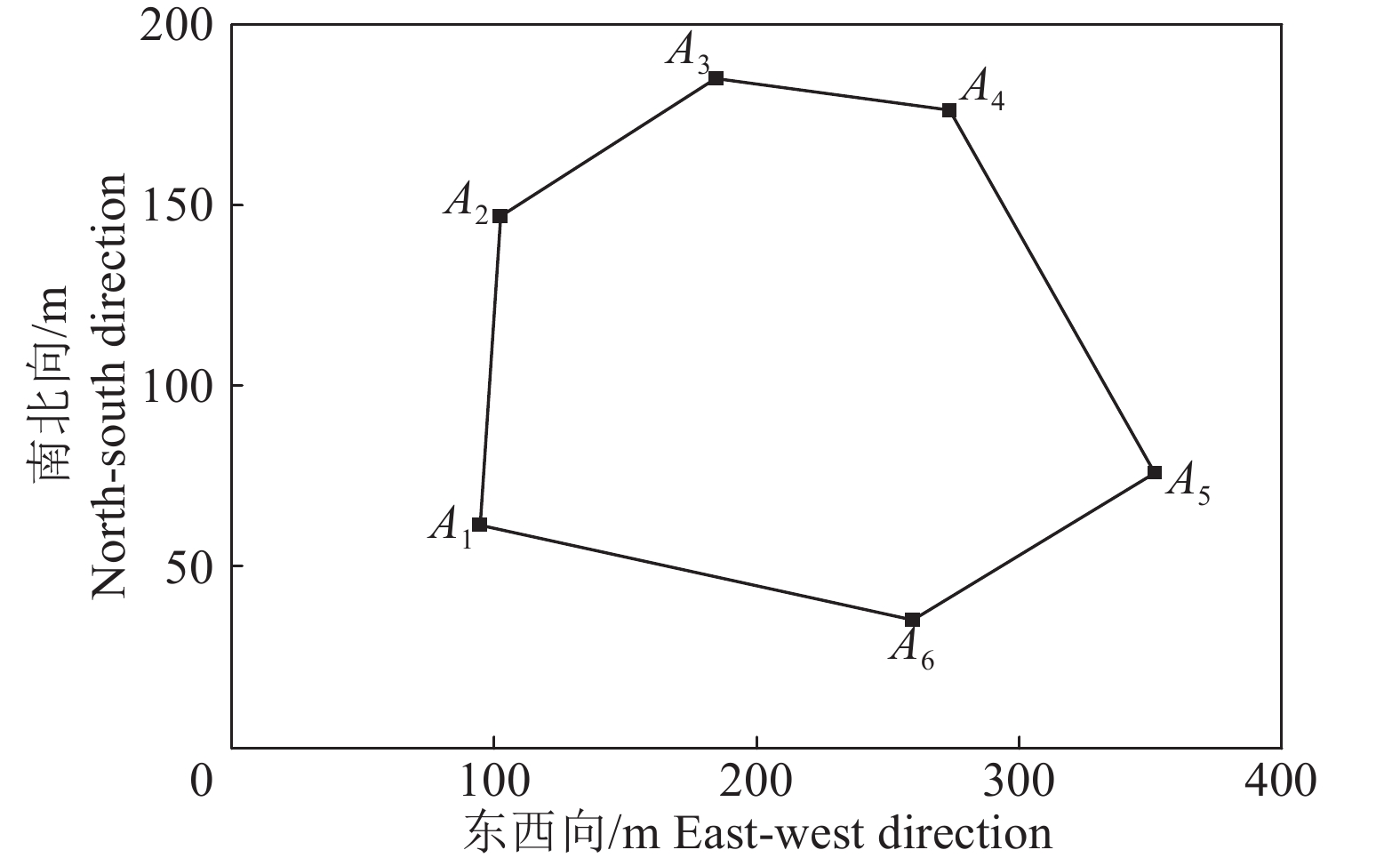
不失一般性假设作业区域是一个结构化凸多边形田块,有n条边、n个角点,角点坐标分别为
${\left. {A({x_i},{y_i})} \right|_{i = 1 \sim n}}$ ,如图5所示。为便于处理,可将实际田块的各角点GPS坐标通过高斯–克吕格转换成平面坐标,并进行坐标平移[15],使其位于直角坐标系的第1象限中。采用扫描线方式遍历整个区域,UAV沿直线飞行,遇到区域边界后转向掉头,沿反方向直线飞行,如此反复,直到覆盖全部区域[16]。航线总次数取决于初始航线方向的选取,如当选择地头边界线ln(即AnA1)作为初始航向时,采用的“点边式”算法[16]遍历所有角点到直线ln的距离,假设Ai到ln的距离最远,设此距离为L;则航线次数n=L/w,通常n不是整数,若舍弃小数部分航线次数N取整数,N=fix(n)时,将出现作业遗漏现象;若取N=fix(n)+1时,虽实现了全区域覆盖,但会出现区域外作业现象。按预定幅宽解算航线次数,对新的航线次数N做如下处理:
$$N = \left\{ {\begin{array}{*{20}{l}} &{n,\;\;\;\;\;\;L - wn \leqslant 0.5w}\\ &{n + 1,\;\;\;L - wn > 0.5w} \end{array}} \right.{\text{。}}$$ (9) 此时,作业幅宽将被微调成w0=L/N,若L远大于预定作业幅宽(w)时,幅宽被改变的绝对变化量不超过0.5w/N,相对变化量不到5%,在诸如喷施、辅助授粉、撒播类飞行作业中,这种小幅度变化可以忽略不计。
2.2 航线与地头边界交汇点坐标解算
图5中,选择ln方向为初始飞行方向,由ln斜率kn可得到ln与x轴正方向夹角θ为:
$$\theta {\rm{ = }}\left\{ {\begin{array}{*{20}{l}} & {{\rm{arctan(}}{k_n}),{k_n} \geqslant 0} \\ & {{\rm{\pi }} + {\rm{arctan(}}{k_n}),{k_n} < 0} \end{array}} \right.{\text{。}}$$ (10) 由于凸多边形是位于第1象限,且选择的起始点A1最接近坐标原点,因此直线ln不会与x轴垂直,即有θ≠π/2。由上式得ln在y轴上的截距b0可表示为:
$${b_{\rm{0}}}{\rm{ = }}{y_n} - {k_n} {x_n}{\text{。}}$$ (11) 在图5中,平行且与直线ln间距离为D的直线lMN可表示为
$y{\rm{ = }}{k_n} x{\rm{ + }}{b_1}$ ,线段b1b0的长度为$\displaystyle\frac{D}{{\cos \theta }}$ ,可求得直线lMN方程为:$$\left( {y - {y_n}} \right){\rm{ = }}{k_n} \left( {x - {x_n}} \right){\rm{ + }}\frac{D}{{\cos \theta }}{\text{。}}$$ (12) 幅宽变更为w0,第1条航线与边界直线ln的距离为半个作业幅宽w0/2,第k条航线与边界直线ln的距离为w0/2+(k–1)w0,令Δb=
$\displaystyle\frac {w_0}{\cos \theta} $ ,则可得按ln方向规划的航线簇轨迹方程ln(k)为:$$\left( {y - {y_n}} \right) - {k_n}\left( {x - {x_n}} \right){\rm{ = }}(k - 0.5)\Delta b{\text{。}}$$ (13) 由于n凸边形田块的n个角点坐标均是已知的,因此田块边界的各直线
${\left. {{l_i}} \right|_{i = 1 \sim n}}$ 的方程为:$$\left( {y - {y_i}} \right) - \frac{{{y_i} - {y_{i{\rm{ + 1}}}}}}{{{x_i} - {x_{i{\rm{ + 1}}}}}} \cdot \left( {x - {x_i}} \right){\rm{ = }}0{\text{。}}$$ (14) 联立式(13)和(14)即可求出作业航线与各地头边界直线的交点坐标,即航线拐点坐标。
2.3 地头边界直线变更算法
从图5中可以看出,以ln方向为初始作业航向,当经过j–1次航线更替后,若角点A2离该条航线的距离已小于w0时,则第j条航线将与左侧另一条地头边界直线l2相交于某一点,否则仍与l1相交。同理,右侧地头边界直线ln–1何时变更为ln–2也取决于角点An–1与该条航线的距离。可总结如下:若角点与航线间距离小于w0时,在航线更替的同时变更边界地头直线;若该距离大于w0时,只变更航线。
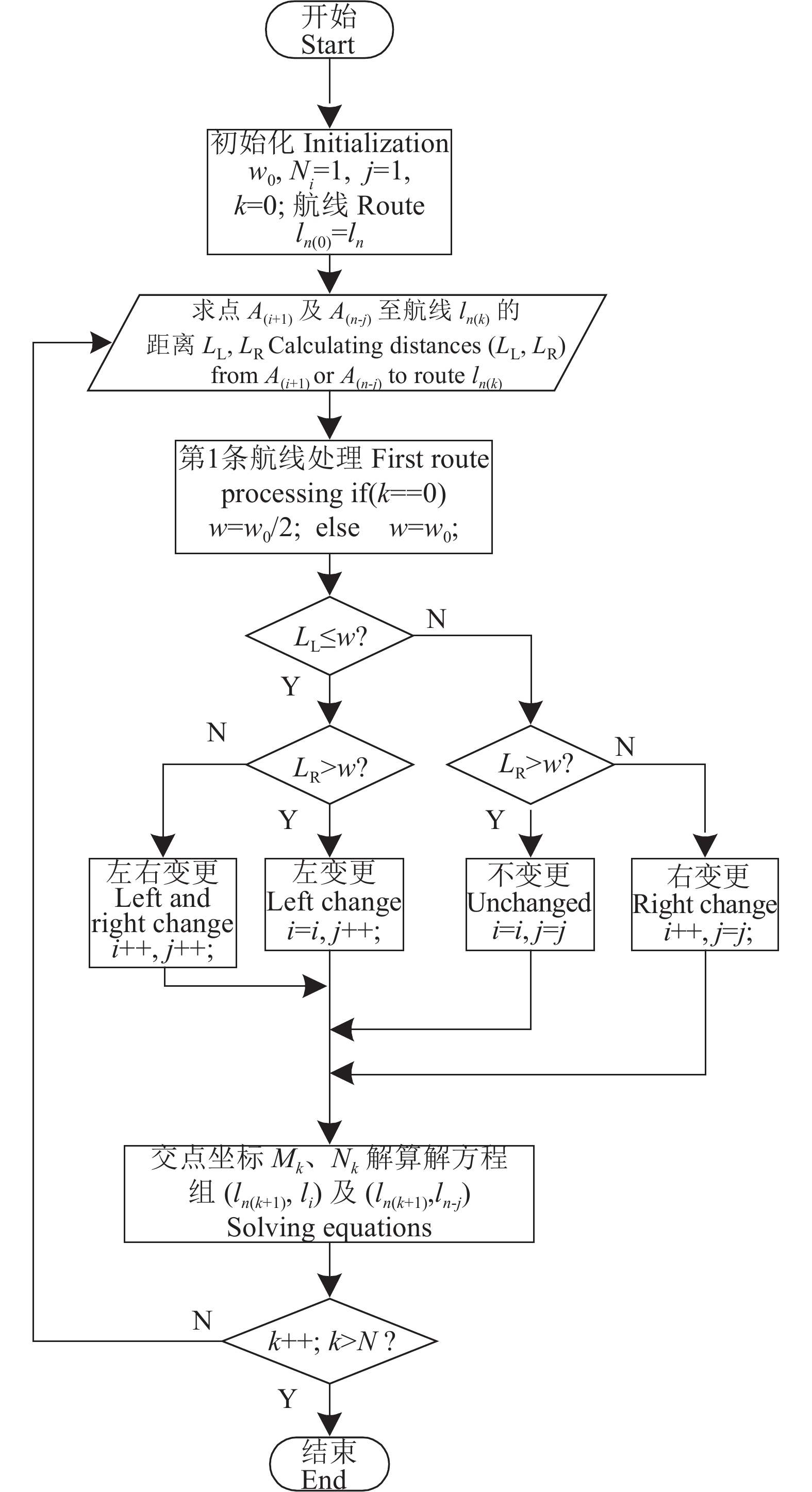
假设UAV以微调后的作业幅宽w0平行于ln方向飞行作业,且Ai点为距离ln最远的角点,将田块边界直线l0~li–1、li~ln–1分别称为左、右部分地头边界,左、右边界直线变更与否以及航迹拐点坐标解算过程如图6所示。
3. 仿真分析
在深圳大鹏某试验基地随意规划出一个凸六边形作业区域,测量6个角点经纬度坐标并经过坐标转换、去偏移值后得到一个面积约为27 253 m2的凸六边形作业区域,如图7所示。
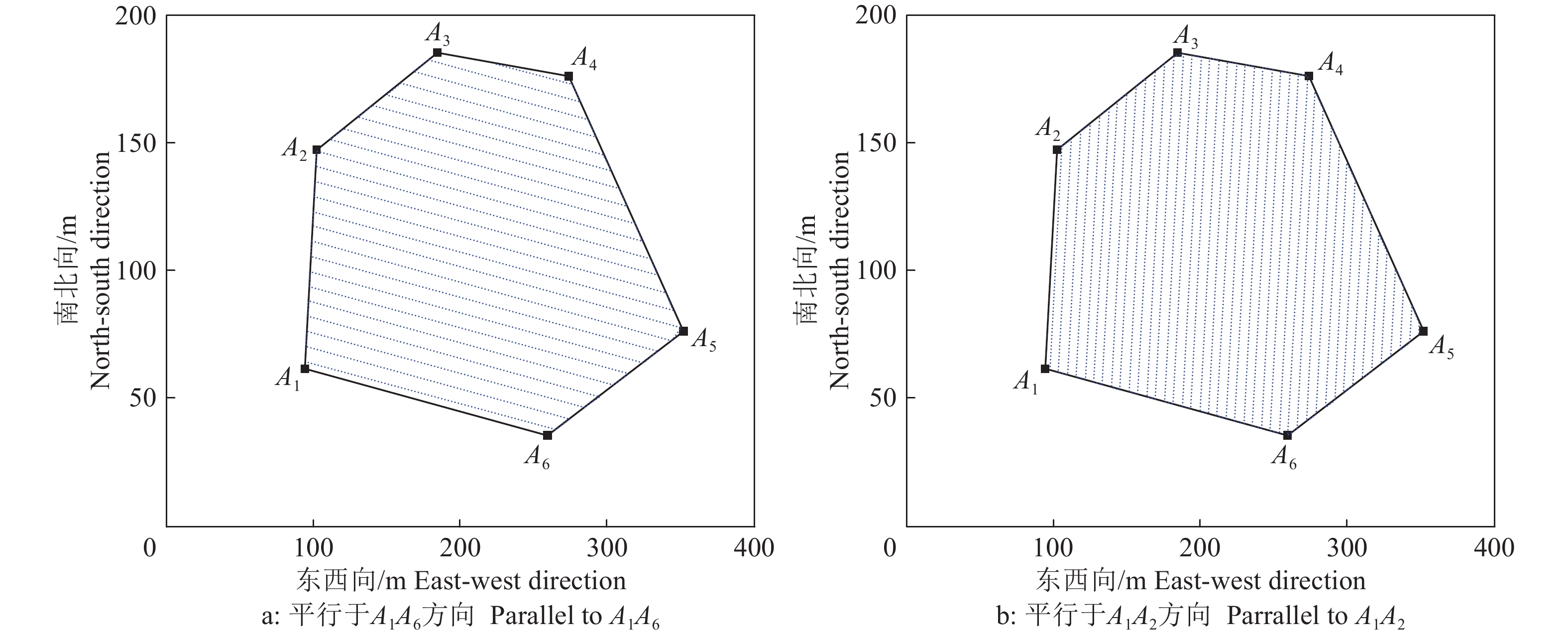
若A1点附近是无人机开始作业起飞时的位置,面向A1点则可沿着左手边方向(平行于A1A2方向)也可沿着右手边方向(平行于A1A6方向)飞行作业,根据各角点坐标及初始作业幅宽,通过前面的航线规划算法编制程序,分别解算2种情况下飞行航线与作业田块区域每条边界相交的拐点坐标。相关飞行参数以深圳高科新农公司生产的某型号15 kg电动无人直升机为例,飞行作业时的速率为3~8 m/s,喷幅为6~7 m,飞行速率取最小值3 m/s,初始作业幅宽取最小值6 m,假设无人机在掉头转弯时的最小转弯半径为4.3 m,特征夹角θ0为44.1°,规划出的2种全区域覆盖条件下的飞行作业航线如图8所示。
![]() 图 8 农用小型UAV以A1点为起落点的2种典型航线Figure 8. Two typical routes of agricultural small UAV with A1 as the landing point
图 8 农用小型UAV以A1点为起落点的2种典型航线Figure 8. Two typical routes of agricultural small UAV with A1 as the landing point统计2种模式下UAV在每条边界处的转弯掉头次数,同时根据航线与每条边界的夹角选择一个最优转弯掉头模式,计算总航线次数、微调后的幅宽、空行行程、工作行程以及工作效率,其中工作效率定义为工作行程与总行程的比值,结果如表1所示。由表1可以看出,就A1点而言,沿A1A6方向飞行作业时的总航线次数少、空行行程短、效率高。
表 1 农用小型UAV在2种航线下的相关参数比较Table 1. Comparisons of relevant parameters based on two typical routes of agricultural small UAV飞行作业航向Flight heading 总航线次数Number of routes 预设幅宽/m Preset width 微调后幅宽/m Fine-tuning width 特征夹角/(°) Characteristic angle 空行行程/m Invalid distance 工作行程/m Valid distance 工作效率%
Working
efficiencyA1A2方向Direction A1A2 42 6 6.07 44.6 997.2 4 774.3 82.72 A1A6方向Direction A1A2 24 6 5.88 42.9 538.5 4 832.2 89.97 同样的处理方法,遍历剩余5个角点A2~A6,计算每个角点沿左手、右手航向下的空行行程、工作效率,统计结果如表2所示。可以看出无论是从A1点出发还是从A6点出发,无人机沿平行于边A1A6飞行作业时的空行行程短、工作效率高,而且数值都非常接近。因此,可将无人机的起降点设置在A1点,沿着A1A6方向飞行作业,或者将起降点设置在A6点,沿着A6A1方向飞行作业。同时仿真发现当沿着凸多边形作业区域的最长边飞行时,总航线次数最少,需要往返掉头转弯的次数也最少。
表 2 不同起降点下的空行行程与工作效率比较Table 2. Comparisons of invalid distance and working efficiency in different landing points角 点
Corner左手方向 Left-hand direction 右手方向 Right-hand direction 空行行程/m
Invalid distance工作效率/%
Working efficiency空行行程/m
Invalid distance工作效率/%
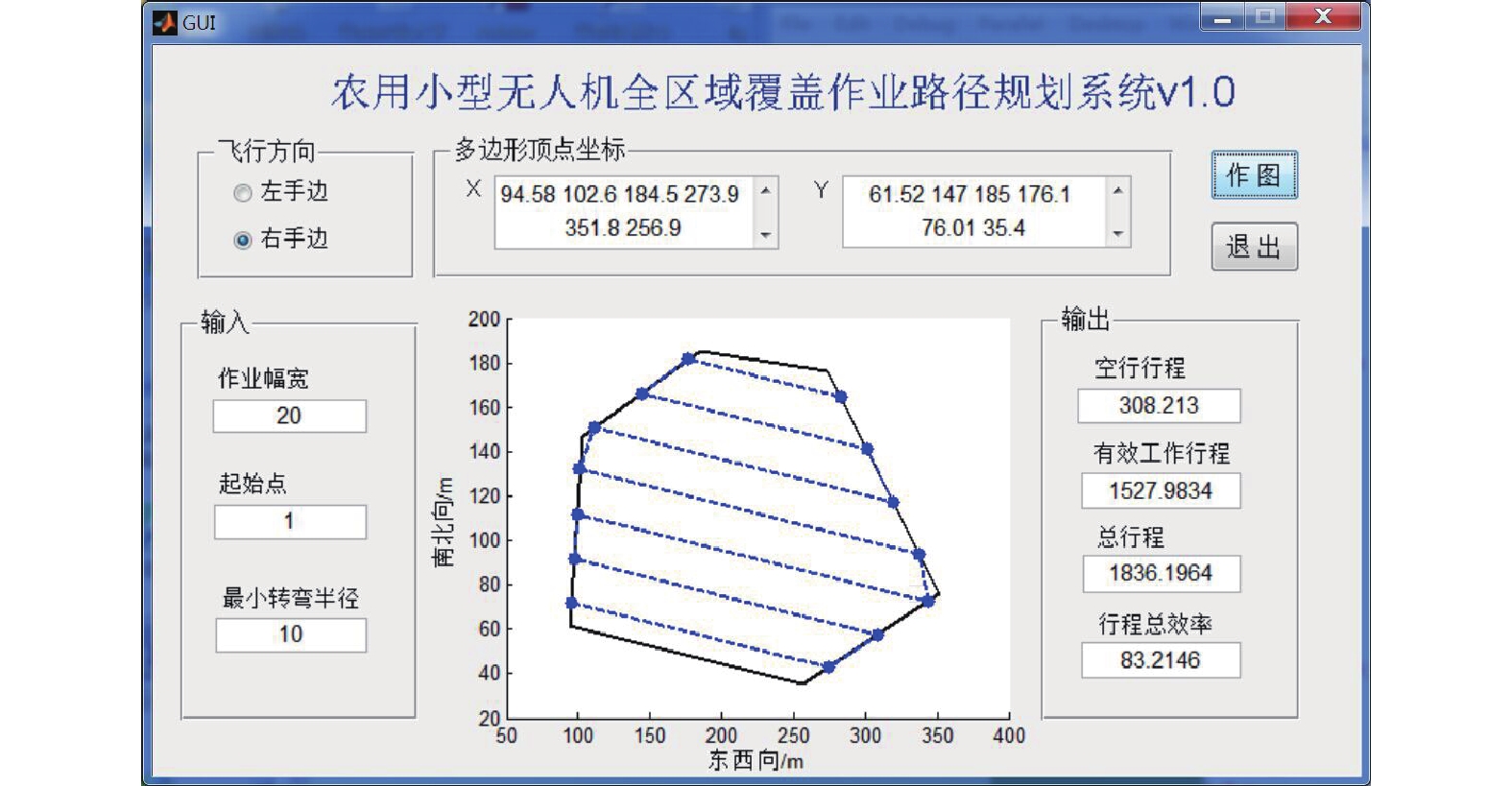
Working efficiencyA1 997.2 82.72 538.5 89.97 A2 648.2 87.99 1 003.3 82.63 A3 552.8 89.75 646.0 88.03 A4 770.6 86.07 645.0 88.43 A5 653.0 88.02 770.8 86.07 A6 542.0 89.98 655.0 88.00 在MATLAB中编制基于最优转弯掉头策略的UAV全区域覆盖作业路径规划系统,其GUI界面如图9所示。在界面输入每个角点的平面坐标、作业幅宽、最小转弯半径、起始点编号以及选择飞行方向后,该程序能对任意凸多边形作业区域进行全区域作业路径规划,自动微调作业幅宽,进行相关作业参数及性能指标的计算和统计。
![]() 图 9 农田全区域覆盖路径规划GUI界面Figure 9. GUI interface of complete coverage path planning for farmland
图 9 农田全区域覆盖路径规划GUI界面Figure 9. GUI interface of complete coverage path planning for farmland4. 结论
本文基于无人机最小转弯半径(R)、飞行作业幅宽(w)、航线与地头边界的夹角(θ)以及特征夹角(θ0),研究了自主飞行模式下的农用小型UAV转弯掉头策略,并对农用小型UAV在地头转弯路径优化选择进行了定量和定性分析。分析了任意凸多边形作业区域下的农用小型UAV沿任意边界为起始航向的作业路径规划方法,提出基于幅宽(w)微变的总航线数归整法,给出了航线与地头边界交点的航线拐点坐标解算的通用算法,且能实现全作业区域覆盖。在试验田随机规划出一个面积约为2.7 hm2的不规则凸六边形田块,仿真发现当无人机沿着平行于最长边飞行作业时,其空行行程最短,约为540 m,工作效率也最高,接近90%。通过编制的 GUI程序可以模拟计算农用小型UAV在不同起降点、不同航向条件下的总航线次数、空行行程、工作行程和工作效率等,可以为农用小型UAV自主飞行、航线规划与最优作业行为实施的起降点选择与航向选择提供参考。
-
![]()
图 8 农用小型UAV以A1点为起落点的2种典型航线
Figure 8. Two typical routes of agricultural small UAV with A1 as the landing point
![]()
图 9 农田全区域覆盖路径规划GUI界面
Figure 9. GUI interface of complete coverage path planning for farmland
表 1 农用小型UAV在2种航线下的相关参数比较
Table 1 Comparisons of relevant parameters based on two typical routes of agricultural small UAV
飞行作业航向Flight heading 总航线次数Number of routes 预设幅宽/m Preset width 微调后幅宽/m Fine-tuning width 特征夹角/(°) Characteristic angle 空行行程/m Invalid distance 工作行程/m Valid distance 工作效率%
Working
efficiencyA1A2方向Direction A1A2 42 6 6.07 44.6 997.2 4 774.3 82.72 A1A6方向Direction A1A2 24 6 5.88 42.9 538.5 4 832.2 89.97  下载: 导出CSV
下载: 导出CSV
表 2 不同起降点下的空行行程与工作效率比较
Table 2 Comparisons of invalid distance and working efficiency in different landing points
角 点
Corner左手方向 Left-hand direction 右手方向 Right-hand direction 空行行程/m
Invalid distance工作效率/%
Working efficiency空行行程/m
Invalid distance工作效率/%
Working efficiencyA1 997.2 82.72 538.5 89.97 A2 648.2 87.99 1 003.3 82.63 A3 552.8 89.75 646.0 88.03 A4 770.6 86.07 645.0 88.43 A5 653.0 88.02 770.8 86.07 A6 542.0 89.98 655.0 88.00
下载: 导出CSV
-
[1] 戴博, 蔡自兴, 崔益安. 移动机器人路径规划技术的研究现状与展望[J]. 控制与决策, 2005, 12(3): 198-202. [2] 席裕庚, 张纯刚. 一类动态不确定环境下机器人的滚动路径规划[J]. 自动化学报, 2002, 28(2): 161-175. [3] 李爱萍, 李元宗. 机器人路径规划方法的研究[J]. 机械工程与自动化, 2009(5): 194-196. [4] JONES P, TANG L, VACHTSEVANOS G. Multi-unmanned aerial vehicle coverage planner for area surveillance missions[C]//AIAA. Guidance, navigation and control conference and exhibit. South Carolina: Hilton Head, 2007: 6453-6464.
[5] 柳煌, 夏学知. 无人机航线规划[J]. 船舶电子工程, 2008, 28(5): 47-51. [6] 胡中华, 赵敏, 姚敏, 等. 无人机航迹规划技术研究及发展趋势[J]. 航空电子技术, 2009, 40(2): 24-36. doi: 10.3969/j.issn.1006-141X.2009.02.006 [7] 蔡自兴, 崔益安. 多种机器人覆盖技术研究进展[J]. 控制与决策, 2008, 23(5): 481-486. doi: 10.3321/j.issn:1001-0920.2008.05.001 [8] 彭孝东. 农用小型无人机遥控作业位姿估计与路径规划[D]. 广州: 华南农业大学, 2015. [9] 孟志军, 刘卉, 王华, 等. 农田作业机械路径优化方法[J]. 农业机械学报, 2012, 43(6): 147-152. doi: 10.6041/j.issn.1000-1298.2012.06.027 [10] OKSANEN T, VISALA A. Coverage path planning algorithms for agricultural field machines[J]. J Field Robot, 2009, 26(8): 651-668. doi: 10.1002/rob.v26:8
[11] 刘向锋. 面向GPS导航拖拉机的最优全局覆盖路径规划研究[D]. 阜新: 辽宁工程技术大学, 2010. [12] 苗玉彬, 王明军. 农业车辆导航系统中路径规划策略的研究进展[J]. 农机化研究, 2011, 33(5): 12-15. doi: 10.3969/j.issn.1003-188X.2011.05.003 [13] 彭孝东, 张铁民, 李继宇, 等. 基于目视遥控的无人机直线飞行与航线作业试验[J]. 农业机械学报, 2014, 45(11): 258-263. doi: 10.6041/j.issn.1000-1298.2014.11.040 [14] 韩宾, 吴开华, 王文杰. 全自动植保无人机弯道姿态控制算法[J]. 传感器与微系统, 2018, 37(4): 142-144. [15] 陈海, 王新民, 焦裕松, 等. 一种凸多边形区域的无人机覆盖航迹规划算法[J]. 航空学报, 2010, 31(9): 1802-1808. [16] 张智刚, 罗锡文, 胡炼, 等. 4种DGPS模块动态定位精度测试与分析[J]. 华南农业大学学报, 2010, 31(1): 102-107. doi: 10.3969/j.issn.1001-411X.2010.01.025 -
期刊类型引用(14)
1. 洪槐斌,刘栋青,姚文华,王斌. 基于虚拟障碍物的IGV转弯路径规划方法. 机车电传动. 2025(01): 139-145 .  百度学术
百度学术
2. 边亮,杨正. 基于AR技术的植保机作业布局与优化分析. 农机化研究. 2024(07): 216-219 . 百度学术
3. 赵浣旻,李亚芹,李志博,刘兆光,蒲岩岩,邱新伟. 基于双路控制的农田精准喷药处方优化试验. 中国农机化学报. 2024(06): 113-118 . 百度学术
4. 杨振伟,陈炳海,张淏凌,郭靖,陈诚. 面向电力设备检修的多无人机协同飞行路径规划算法. 微型电脑应用. 2023(01): 88-91 . 百度学术
5. 陈盛德,廖玲君,徐小杰,陈威任,黎志宏,周志艳,兰玉彬. 中国植保无人机及其施药关键技术的研究现状与趋势. 沈阳农业大学学报. 2023(04): 502-512 . 百度学术
6. 宋志强,陈少博. 考虑最短转弯半径的无人机区域覆盖航迹规划. 实验室研究与探索. 2023(07): 124-129 . 百度学术
7. 张倩,彭建. 基于深度卷积神经网络的足球射门最优路径规划系统. 兰州文理学院学报(自然科学版). 2022(02): 91-95 . 百度学术
8. 兰玉彬,赵德楠,张彦斐,朱俊科. 生态无人农场模式探索及发展展望. 农业工程学报. 2021(09): 312-327 . 百度学术
9. 张云飞. 基于贝叶斯决策的无人机飞行路径自动规划方法. 计算机测量与控制. 2021(11): 196-200 . 百度学术
10. 黄小毛,张垒,TANG Lie,唐灿,李小霞,贺小伟. 复杂边界田块旋翼无人机自主作业路径规划. 农业机械学报. 2020(03): 34-42 . 百度学术
11. 黄小毛,唐灿,TAN GLie,罗承铭,李文成,张垒. 含障碍物多田块下旋翼无人机作业返航补给规划研究. 农业机械学报. 2020(07): 82-90+71 . 百度学术
12. 范叶满,沈楷程,王东,翟长远,张海辉. 基于模拟退火算法的无人机山地作业能耗最优路径规划. 农业机械学报. 2020(10): 34-41 . 百度学术
13. 黄传鹏,毛鹏军,李鹏举,耿乾,方骞,张家瑞. 农用无人机自主飞行技术研究与趋势. 中国农机化学报. 2020(11): 162-170 . 百度学术
14. 李文广,李建增,胡永江,李永科,褚丽娜. 基于摆扫成像的无人机视觉侦察航迹规划方法. 中国惯性技术学报. 2019(04): 466-473 . 百度学术
其他类型引用(10)






















计量
- 文章访问数: 1904
- HTML全文浏览量: 9
- PDF下载量: 2207
- 被引次数: 24
