A path optimization algorithm for cooperative operation of multiple unmanned mowers in apple orchard
-
摘要:目的
提高新型苹果园内多台无人割草机协同作业时的工作效率。
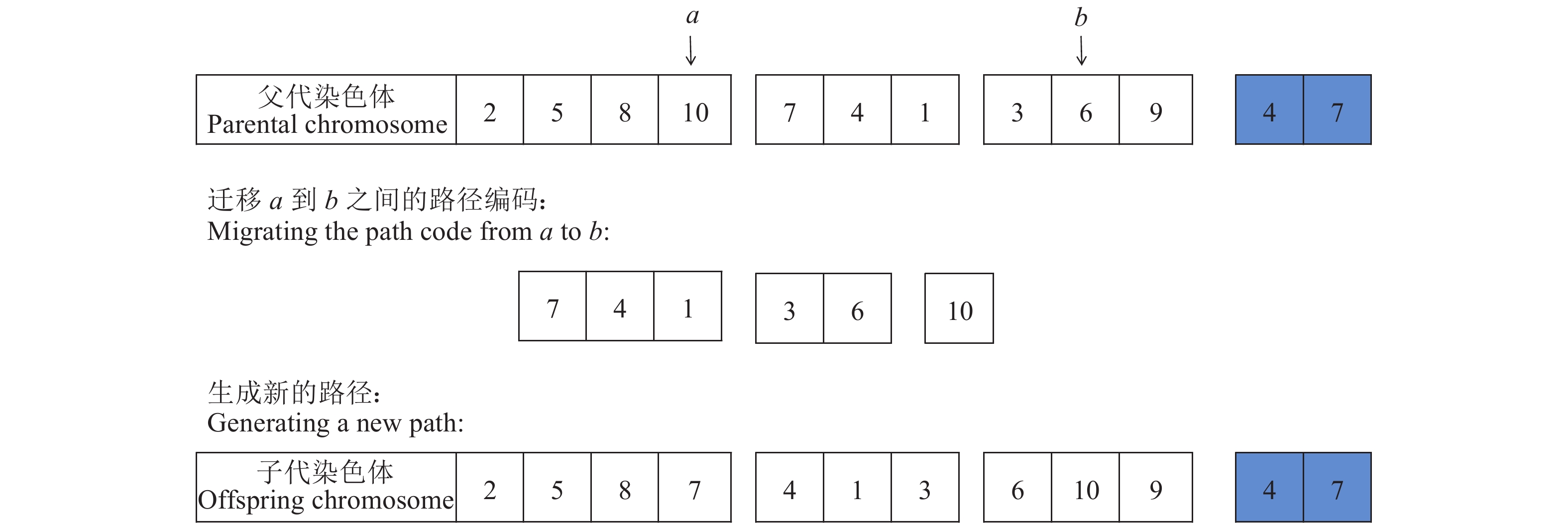
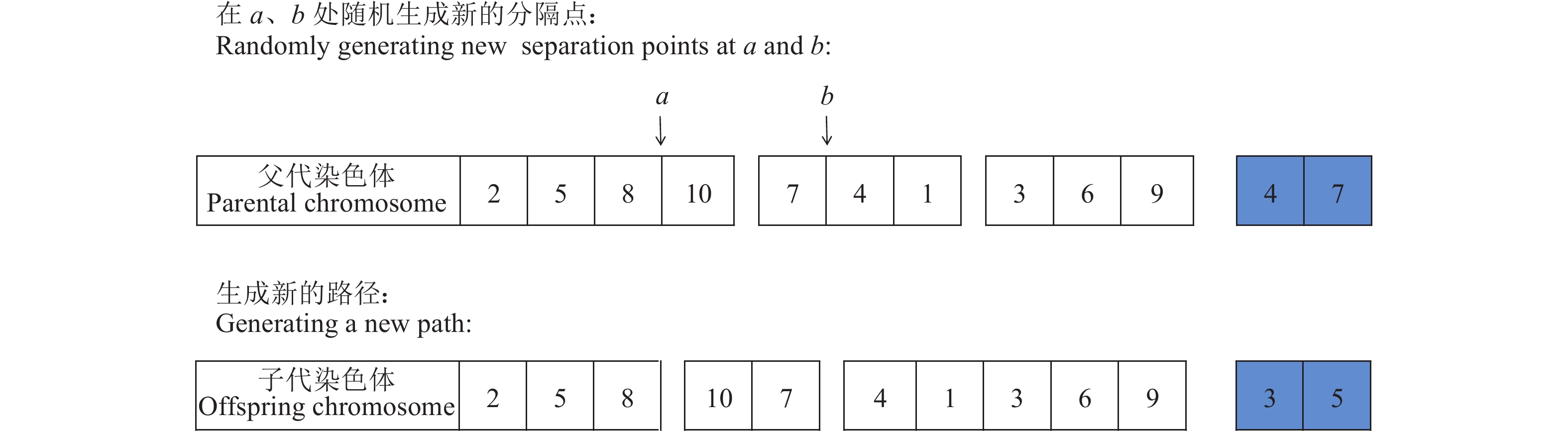
方法提出一种改进的遗传算法(Improved genetic algorithm, IGA),为每台割草机分配并优化作业路径。根据实际无人割草机作业情况,以总转弯时间和作业时长为综合优化目标,构建无人割草机多机作业路径优化模型。通过设定任务阈值,引入改良圈策略和Metropolis准则改进遗传算法(Genetic algorithm, GA)以求解模型。
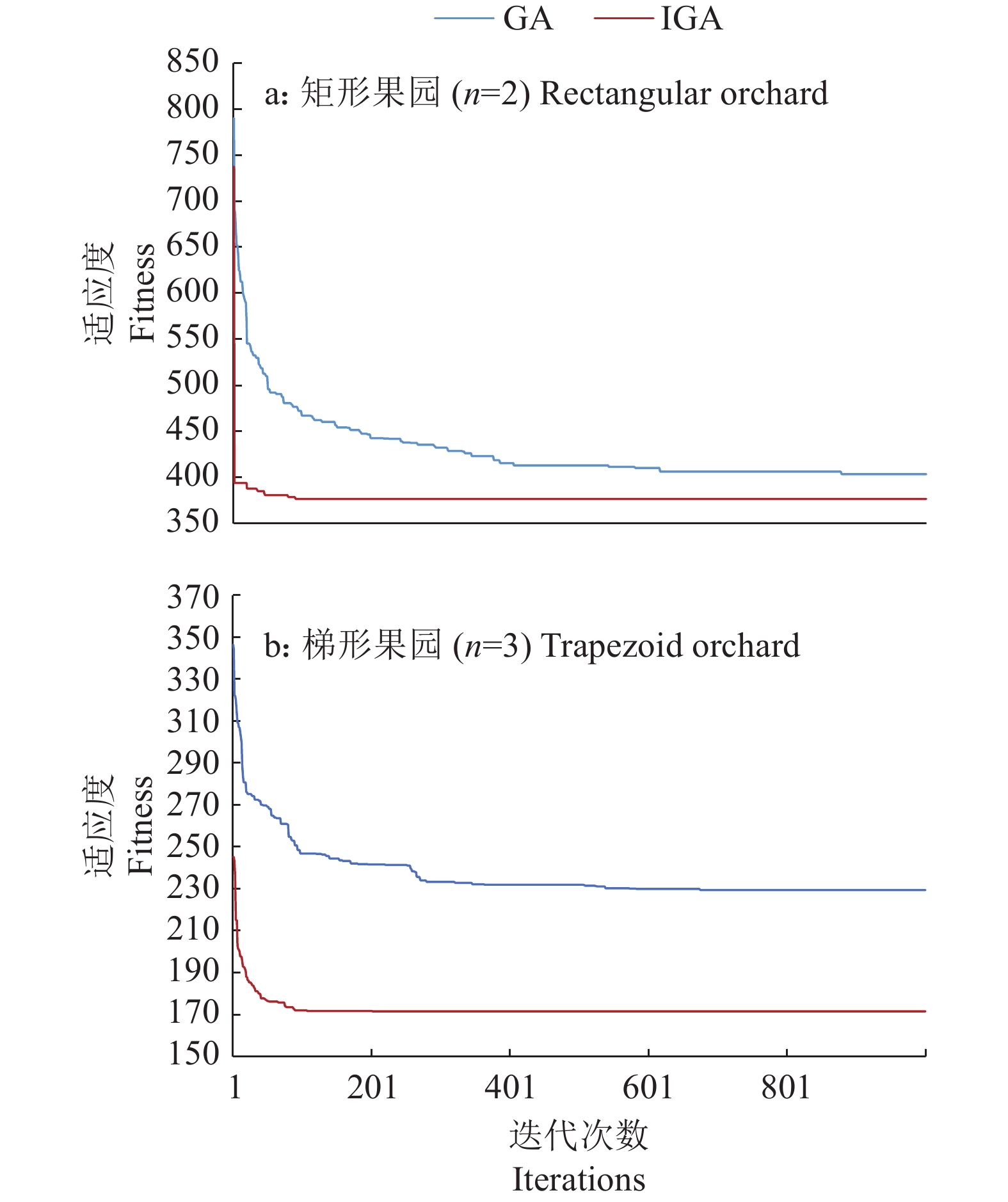
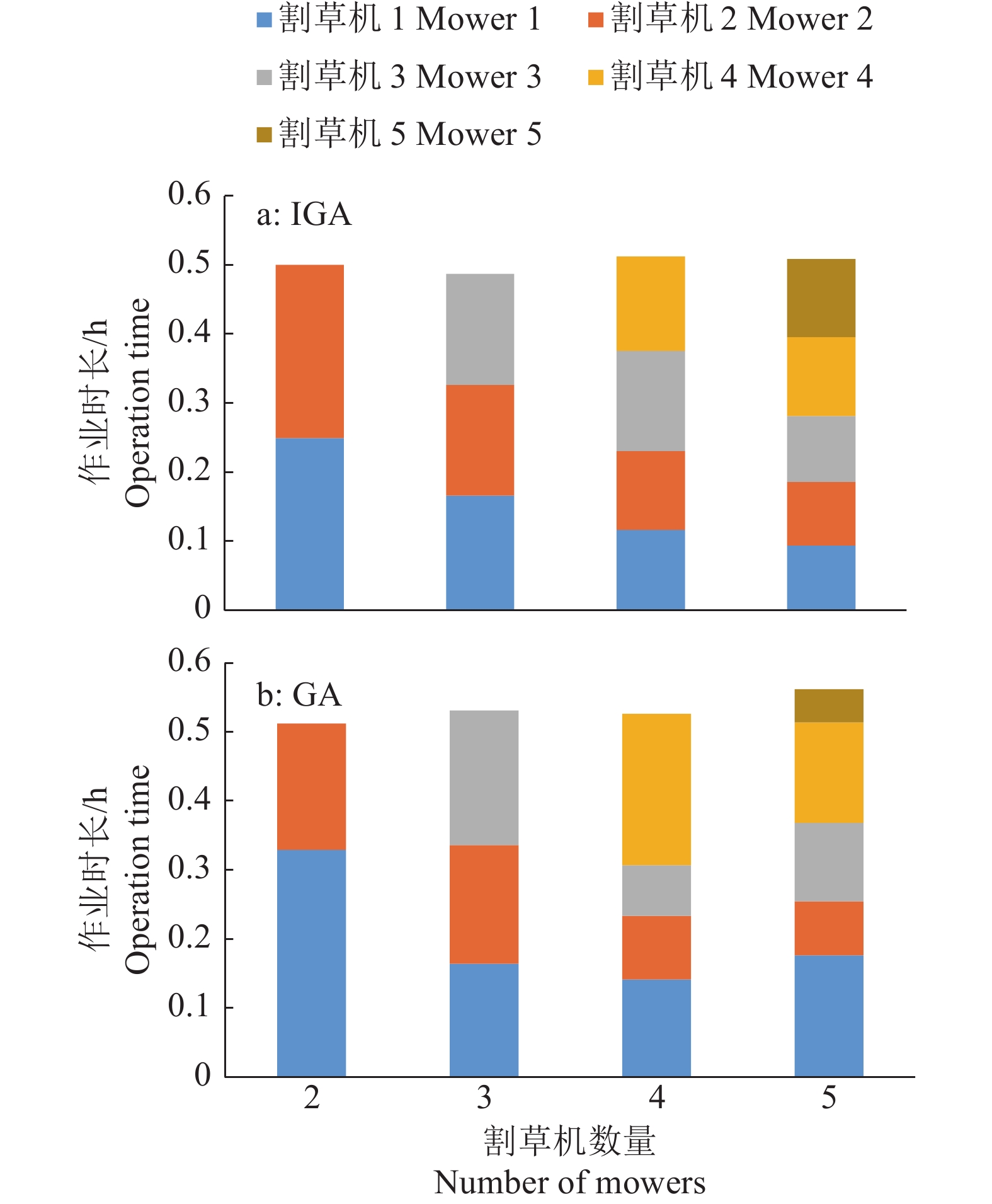
结果仿真试验结果表明,IGA为每台割草机分配的任务量均衡,与GA相比,IGA优化后的矩形果园路径平均总转弯时间和作业时长分别减少22.89%和19.36%;与分区作业相比,IGA优化后的矩形果园路径平均总转弯时间和作业时长分别减少45.53%和10.68%。在梯形果园中,IGA不受果树分布影响,与GA和分区作业相比,平均总转弯时间分别减少14.38%和34.08%,平均作业时长分别减少23.71%和10.07%。
结论所提出的IGA性能更好,能有效优化机群的作业路径,缩短作业时长,提高作业能力。
Abstract:ObjectiveTo improve the work efficiency of cooperative operation of multiple unmanned lawn mowers in modern apple orchard.
MethodAn improved genetic algorithm (IGA) was proposed to assign and optimize the operating path for each mower. According to the actual operation of unmanned mowers, taking the total turning time and operation time as the comprehensive optimization goal, the optimization model for the operating path of multi-unmanned mower was constructed. In order to solve the model, the genetic algorithm (GA) was improved by setting task thresholds, introducing the improved circle algorithm and Metropolis criterion.
ResultSimulation experiments results showed that the IGA balanced the workload assigned to each unmanned mower. Compared with GA, the path optimized by IGA resulted in an average reduction of 22.89% and 19.36% in the total turning time and operation time, respectively, in the rectangular orchard. Compared with the partition operation, the total turning time and operation time of the path optimized by IGA were reduced by an average of 45.53% and 10.68%, respectively, in the rectangular orchard. In the trapezoidal orchard, IGA was not affected by the distribution of fruit trees. Compared with GA and partition operation, the average value of total turning time reduced by 14.38% and 34.08%, respectively, while the average value of operation time reduced by 23.71% and 10.07%, respectively.
ConclusionThe proposed IGA performs better and can effectively optimize the operating paths of the fleet, reducing the operation duration and improving work capacity.
-
Keywords:
- Path optimization /
- Unmanned mower /
- Cooperative operation /
- Genetic algorithm /
- Apple orchard
-
-
![]()
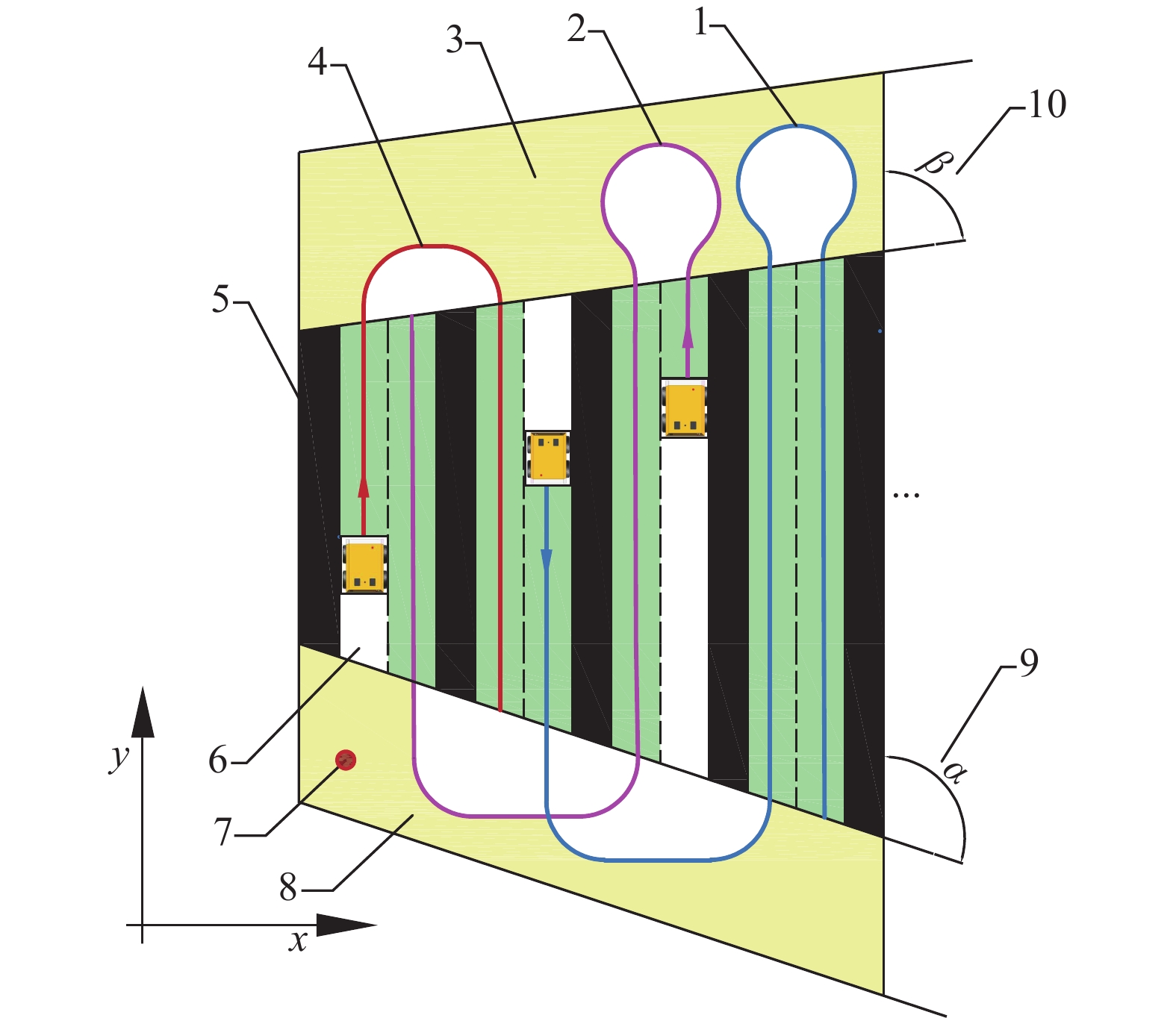
图 1 苹果园内多割草机协同作业示意图
1:割草机1作业路径;2:割草机2作业路径;3:地头LH;4:割草机3作业路径;5:地布;6:作业行;7:出发点/结束点;8:地头UH;9、10:割草机作业角
Figure 1. Schematic diagram for cooperative operation of multiple mowers in apple orchard
1: Operating path of mower 1; 2: Operating path of mower 2; 3: Headland LH; 4: Operating path of mower 3; 5: Ground cloth; 6: Rows; 7: Starting point/end point; 8: Headland UH; 9, 10: Mower operating angle
![]()
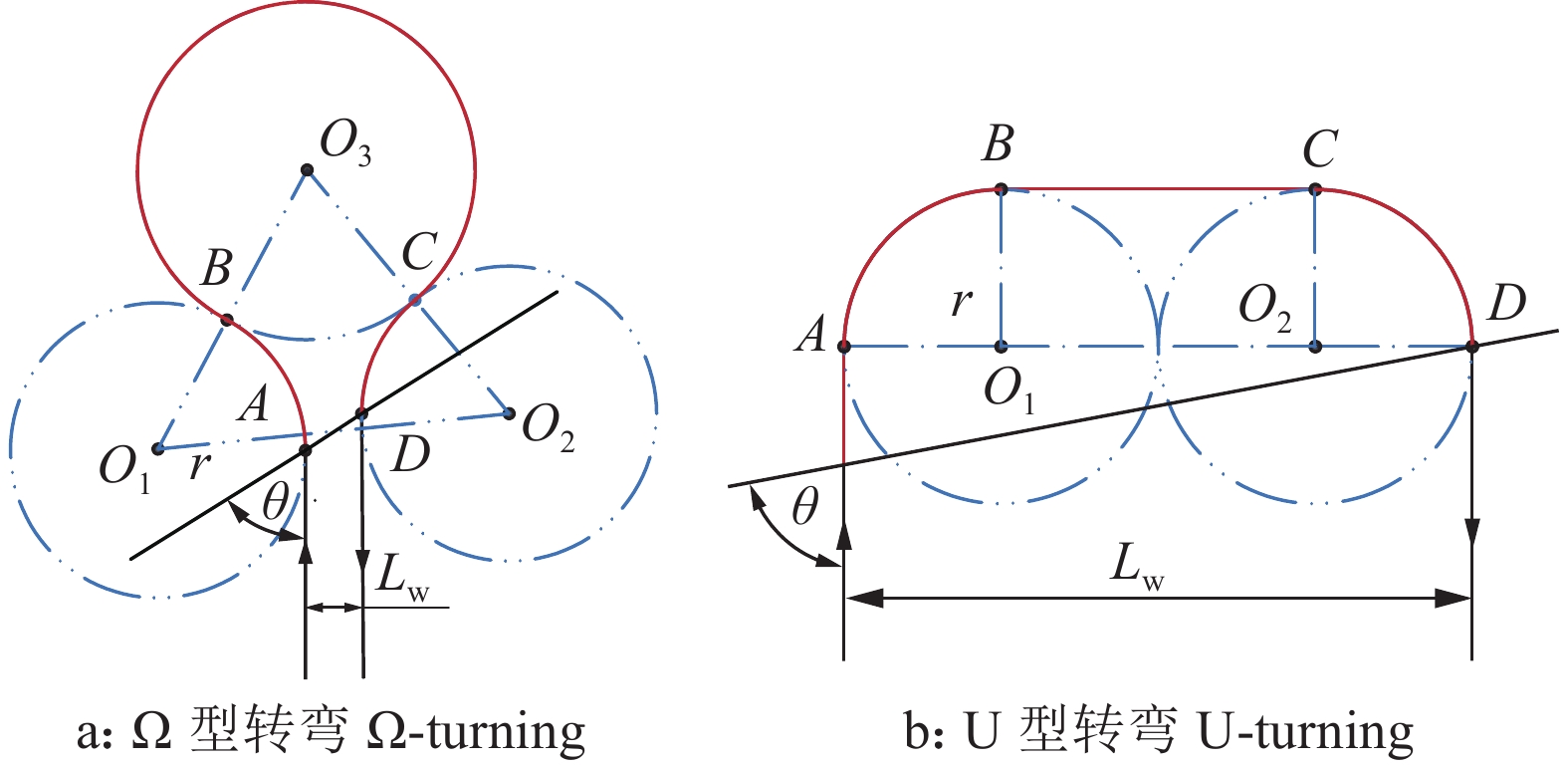
图 2 割草机转弯方式
O1和O2为辅助圆圆心;A、B、C和D为转弯路径与圆O1、圆O2的切点;θ为作业角;Lw为割草机的作业间距;r为最小转弯半径
Figure 2. Turning patterns of the mower
O1 and O2 represent the centers of the auxiliary circles; A, B, C and D represent the tangent points of the turning path to circles O1 and O2; θ represents the operating angle; Lw represents the operating spacing of the mower; r represents the minimum turning radius
![]()
图 9 不同割草机数量下IGA与GA的作业时长对比
Figure 9. Comparison of operation time between IGA and GA under different numbers of lawn mowers
![]()
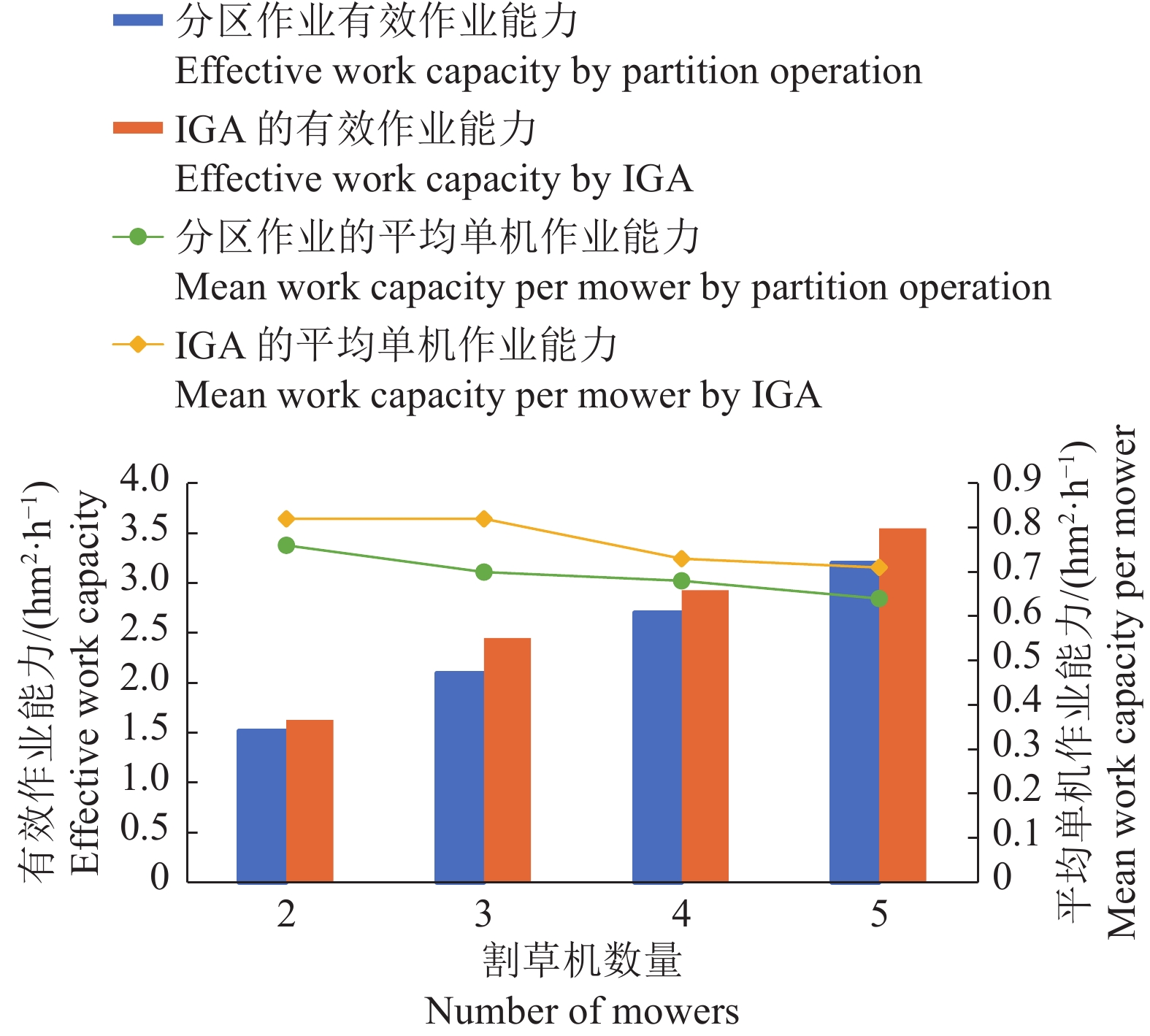
图 10 有效作业能力和平均单机作业能力对比
Figure 10. Comparison of effective work capacity and mean work capacity per mower
表 1 GA与IGA的总转弯时间和作业时长对比
Table 1 Comparison of total turning time and operation time between GA and IGA
苹果园
Apple
orchard割草机数量
Number of
mowers总转弯时间
Total turning time作业时长
Operation timetT(GA)/s tT(IGA)/s DRT/% tO(GA)/s tO(IGA)/s DRO/% 矩形
Rectangle1 370.84 332.50 10.34 1 770.84 1 744.50 1.49 2 428.94 333.82 22.17 1 287.60 907.69 29.51 3 462.16 363.25 21.40 937.68 611.58 34.78 4 471.78 367.36 22.13 651.05 504.61 22.49 5 563.93 374.81 33.54 564.89 434.48 23.09 平均 Mean 459.53 354.35 22.89 1 042.41 840.57 19.36 梯形
Trapezoid1 249.16 237.49 4.68 1 161.51 1 149.84 1.00 2 287.68 263.89 8.27 1 018.61 624.96 38.65 3 346.77 279.55 19.38 637.38 423.36 33.58 4 327.29 271.55 17.03 502.61 379.79 24.44 5 355.57 288.69 18.81 415.78 272.08 34.56 平均 Mean 313.29 268.23 14.38 747.18 570.01 23.71  下载: 导出CSV
下载: 导出CSV
表 2 分区作业(PP)与IGA的总转弯时间和作业时长对比
Table 2 Comparison of total turning time and operation time between partition operation (PP) and IGA
苹果园
Apple
orchard割草机数量
Number of
mowers总转弯时间
Total turning time作业时长
Operation timetT(PP)/s tT(IGA)/s DRT/% tO(PP)/s tO(IGA)/s DRO/% 矩形
Rectangle1 505.54 352.17 30.34 1 938.87 1 752.17 9.63 2 586.73 343.05 41.53 993.36 919.41 7.44 3 673.00 366.73 45.51 724.33 614.61 15.15 4 753.68 375.19 50.22 590.79 513.50 13.08 5 835.38 390.05 53.31 472.84 416.24 11.97 平均 Mean 670.87 365.44 45.53 932.04 843.18 10.68 梯形
Trapezoid1 336.35 240.29 28.56 1 248.70 1 152.63 7.69 2 404.97 254.12 37.25 760.74 615.32 19.12 3 396.08 269.22 32.03 509.27 439.14 13.77 4 470.14 303.87 35.37 416.47 350.44 15.85 5 455.80 292.64 35.80 326.28 275.60 15.53 平均 Mean 412.67 272.03 34.08 652.29 586.63 10.07
下载: 导出CSV
-
[1] 国家统计局. 中国统计年鉴[M]. 北京: 中国统计出版社, 2022. [2] JU C, KIM J, SEOL J, et al. A review on multirobot systems in agriculture[J]. Computers and Electronics in Agriculture, 2022, 202: 107336. doi: 10.1016/j.compag.2022.107336
[3] 李丽莉, 李保华, 仇贵生, 等. 矮化密植苹果园叶片病虫害调查取样技术[J]. 中国果树, 2022(6): 74-78. [4] REN J, LI F, YIN C. Orchard grass safeguards sustainable development of fruit industry in China[J]. Journal of Cleaner Production, 2023, 382: 135291. doi: 10.1016/j.jclepro.2022.135291
[5] BOCHTIS D D, VOUGIOUKAS S G. Minimising the non-working distance travelled by machines operating in a headland field pattern[J]. Biosystems Engineering, 2008, 101(1): 1-12. doi: 10.1016/j.biosystemseng.2008.06.008
[6] 张漫, 季宇寒, 李世超, 等. 农业机械导航技术研究进展[J]. 农业机械学报, 2020, 51(4): 1-18. [7] BOCHTIS D, GRIEPENTROG H W, VOUGIOUKAS S, et al. Route planning for orchard operations[J]. Computers and Electronics in Agriculture, 2015, 113: 51-60. doi: 10.1016/j.compag.2014.12.024
[8] CONESA-MUÑOZ J, PAJARES G, RIBEIRO A. Mix-opt: A new route operator for optimal coverage path planning for a fleet in an agricultural environment[J]. Expert Systems with Applications, 2016, 54: 364-378. doi: 10.1016/j.eswa.2015.12.047
[9] 姚竟发, 滕桂法, 霍利民, 等. 联合收割机多机协同作业路径优化[J]. 农业工程学报, 2019, 35(17): 12-18. [10] HAN X, LAI Y, WU H. A path optimization algorithm for multiple unmanned tractors in peach orchard management[J]. Agronomy, 2022, 12(4): 856. doi: 10.3390/agronomy12040856
[11] 罗承铭, 熊陈文, 黄小毛, 等. 四边形田块下油菜联合收获机全覆盖作业路径规划算法[J]. 农业工程学报, 2021, 37(9): 140-148. [12] 黄小毛, 丁幼春, 宗望远, 等. 农机作业地头转弯方式及路径生成算法研究[C]//中国农业工程学会(CSAE). 中国农业工程学会2011年学术年会论文集. 重庆: CSAE, 2011: 406-411. [13] HE Z, BAO Y, YU Q, et al. Dynamic path planning method for headland turning of unmanned agricultural vehicles[J]. Computers and Electronics in Agriculture, 2023, 206: 107699. doi: 10.1016/j.compag.2023.107699
[14] SEYYEDHASANI H, DVORAK J S. Reducing field work time using fleet routing optimization[J]. Biosystems Engineering, 2018, 169: 1-10. doi: 10.1016/j.biosystemseng.2018.01.006
[15] BOCHTIS D D, SØRENSEN C G. The vehicle routing problem in field logistics part I[J]. Biosystems Engineering, 2009, 104(4): 447-457. doi: 10.1016/j.biosystemseng.2009.09.003
[16] KATOCH S, CHAUHAN S S, KUMAR V. A review on genetic algorithm: Past, present, and future[J]. Multimedia Tools and Applications, 2021, 80: 8091-8126. doi: 10.1007/s11042-020-10139-6
[17] LAMINI C, BENHLIMA S, ELBEKRI A. Genetic algorithm based approach for autonomous mobile robot path planning[J]. Procedia Computer Science, 2018, 127: 180-189. doi: 10.1016/j.procs.2018.01.113
[18] 叶多福, 刘刚, 何兵. 一种多染色体遗传算法解决多旅行商问题[J]. 系统仿真学报, 2019, 31(1): 36-42. [19] LIU L, WANG X, YANG X, et al. Path planning techniques for mobile robots: Review and prospect[J]. Expert Systems with Applications, 2023, 227: 120254.
[20] 王猛, 赵博, 刘阳春, 等. 基于多变异分组遗传算法的多机协同作业静态任务分配[J]. 农业机械学报, 2021, 52(7): 19-28. [21] 张琛, 詹志辉. 遗传算法选择策略比较[J]. 计算机工程与设计, 2009, 30(23): 5471-5474. [22] 陈加俊, 谭代伦. 求解旅行商问题的探索−开发−跳跃策略单亲遗传算法[J]. 计算机应用研究, 2023, 40(5): 1375-1380. [23] CONESA-MUÑOZ J, GONZALEZ-DE-SOTO M, GONZALEZ-DE-SANTOS P, et al. Distributed multi-level supervision to effectively monitor the operations of a fleet of autonomous vehicles in agricultural tasks[J]. Sensors, 2015, 15(3): 5402-5428. doi: 10.3390/s150305402
[24] SEYYEDHASANI H, DVORAK J S. Using the Vehicle Routing Problem to reduce field completion times with multiple machines[J]. Computers and Electronics in Agriculture, 2017, 134: 142-150. doi: 10.1016/j.compag.2016.11.010