
Research on crop tissue structure and mechanical properties
-
摘要:
传统的宏观力学性能试验方法无法解析作物的力学性能与形态结构、微观结构和化合物成分存在的内在联系。显微图像获取与处理技术和有限元分析的深度发展使多尺度方法成为了作物力学研究的新途径。作物组织结构与力学性能研究是作物多尺度力学的重要部分。本文从作物组织的形态结构及几何模型构建方法、力学模型构建与求解方法和力学性能试验方法等3个方面对作物组织多尺度结构力学的研究现状进行了综述,分析了现有的组织几何模型与力学模型构建方法和力学性能试验方法等方面存在的局限性,并对多尺度结构力学研究进行了展望。
Abstract:Crop mechanical properties are intrinsically related to its morphological structure, microstructure and compound composition, and traditional macroscopic mechanical test methods cannot resolve the relationship. The development of microscopic image acquisition and processing technology and finite element simulation has led to a new approach to study on crop mechanics at multiple scales. The study of the structure and mechanical properties of crop tissue is an important part of crop mechanics at multiple scales. This paper reviewed the current status and development of research on the multi-scale structural mechanics of crop tissue from three aspects: Morphological structure and geometric model construction methods, mechanical models and its solution method, and mechanical performance experiment methods of crop tissue, and pointed out their current shortcomings from those three aspects. The prospects for conducting multi-scale structural mechanics research were also presented.
-
Keywords:
- Crop /
- Tissue structure /
- Geometric model /
- Mechanical model /
- Multi-scale
-
玉米已成为我国种植面积最大的粮食作物,为了满足玉米机械化种植高精度与高效率的要求,高速精量排种技术是玉米播种装备发展的重要方向[1-3]。
高速精量排种器是实现机械化高速精量播种的核心工作部件,其排种性能直接影响播种质量[4-7]。按工作原理可将排种器分为机械式[8-9]和气力式[10-12]两种。机械式精量排种器因其结构简单、可靠性好、制造和使用成本低等优点,在我国中小规模的农业生产中具有广泛的应用前景[13-17]。但随着排种器作业速度的提高,机械式精量排种器在高速作业时,难以实现稳定的充种和清种,从而导致漏播和重播现象严重,无法发挥其优点。
为提升机械式排种器在高速作业时的充种性能,Ma等[18]针对现有机械式排种器作业速度慢、对种子适应能力差的问题,设计了一种取种滑块主动夹取种子。Chen等[19]为提高勺轮式排种器的高速作业性能,利用离散元法(Discrete element method and multi-body dynamics, DEM)对种勺的结构参数进行了优化。都鑫等[20]设计一种扰种条增加充种区种群活跃度、降低种群内摩擦力,从而提高了机械式排种器的充种率和对速度的适应性。在高速清种性能提升研究方面,唐汉[21]在排种盘上设计一种振动凹凸面结构,利用机械振动与清种毛刷配合进行复合清种,提高清种效果。李玉环等[22]采用双侧清种方法,有效降低了漏清率,对高速条件下的过清率也有所改善。上述研究取得了一些研究成果,但是主要侧重于优化型孔、增设促充和改进清种结构来提高排种器的工作性能,对于高速作业条件下,种子无序堆积、充种姿态各异的状态并未改变,这将会影响排种器的充种与清种过程,从而造成机械式排种器在高速作业时作业性能下降。
为此,本文设计一种基于分级限姿导引侧充−径向突变辅助清种的双列限姿导引侧充式玉米高速精量排种器。该排种器可通过分离种群并规划种子运动轨迹的方法,有效降低种子无序堆积、充种姿态各异对充种过程的干扰,同时借助径向突变辅助清种结构,提升排种器在高速作业条件下的清种效率。根据种子的物理特性和充种阶段种子的填充姿态,结合对排种器工作过程的理论分析,进一步确定关键部件的基本结构参数。采用离散元法与多体动力学(Discrete element method and multi-body dynamics, DEM-MBD)耦合仿真试验和响应面优化方法对充种型孔的关键结构参数进行优化,并通过开展台架试验,验证仿真试验的可靠性和排种器高速作业时的作业速度适应性,以期为机械式高速精量排种器的研发提供参考。
1. 排种器结构与工作原理
双列限姿导引侧充式玉米高速精量排种器总体结构如图1所示,主要由前壳、左限姿板、轴承、轴端螺母、左排种盘、左护种盘、外壳、Π形入种管、导种盘、右护种盘、右排种盘、传动轴、右限姿板、后壳、型孔插件、压缩弹簧等部件组成。
![]() 图 1 排种器结构示意图1:前壳,2:左限姿板,3:轴承,4:轴端螺母,5:左排种盘,6:左护种盘,7:外壳,8:Π形入种管,9:导种盘,10:右护种盘,11:右排种盘,12:传动轴,13:右限姿板,14:后壳,15:型孔插件,16:导种槽,17:压缩弹簧,18:充种型孔。Figure 1. Structure diagrams of seed metering device1: Front shell, 2: Left posture limiting plate, 3: Bearing, 4: Shaft end nut, 5: Left seed metering plate, 6: Left seed protection plate, 7: Shell, 8: Π shaped seed intake tube, 9: Seed guiding tray, 10: Right seed protection plate, 11: Right seed metering plate, 12: Drive shaft, 13: Right posture limiting plate, 14: Back shell, 15: Orifice plug, 16: Seed guiding channel, 17: Compression spring, 18: Seed filling hole.
图 1 排种器结构示意图1:前壳,2:左限姿板,3:轴承,4:轴端螺母,5:左排种盘,6:左护种盘,7:外壳,8:Π形入种管,9:导种盘,10:右护种盘,11:右排种盘,12:传动轴,13:右限姿板,14:后壳,15:型孔插件,16:导种槽,17:压缩弹簧,18:充种型孔。Figure 1. Structure diagrams of seed metering device1: Front shell, 2: Left posture limiting plate, 3: Bearing, 4: Shaft end nut, 5: Left seed metering plate, 6: Left seed protection plate, 7: Shell, 8: Π shaped seed intake tube, 9: Seed guiding tray, 10: Right seed protection plate, 11: Right seed metering plate, 12: Drive shaft, 13: Right posture limiting plate, 14: Back shell, 15: Orifice plug, 16: Seed guiding channel, 17: Compression spring, 18: Seed filling hole.如图1b所示,左、右排种盘分别装有18个均匀分布的型孔插件,通过压缩弹簧分别卡入左、右护种盘中,共同组成充种型孔;把左、右护种盘固定在外壳上后,传动轴依次穿过右排种盘、导种盘和左排种盘后用轴端螺母固定,通过轴承连接到前后壳体上;前后壳体上分别固定左、右限姿板,与排种盘和护种盘共同组成种子的分级限姿引导通道,从而实现分级限制引导种子姿态的目的。
种子从Π形入种管进入前、后两对称种室后,依次经过充种、清种、递种、携种、投种这5个阶段。充种阶段可以分为2个过程,在过程一中,种子经过限姿板、排种盘、型孔插件以及护种盘共同组成的限姿通道以合适的姿态到达预充种位置,完成分级限姿引导过程;在过程二中,随着排种盘的转动,预充种位置的种子侧充进入护种盘与型孔插件共同组成的充种型孔内,完成整个充种过程。在清种阶段中,种子随排种盘转动到清种区域时,在重力作用以及型孔插件的径向突变产生的摩擦力的辅助作用下,完成快速清种,清种完成后,充种型孔内仅余单粒种子,完成清种过程。在递种阶段中,单粒种子随排种盘转动到护种盘的递种口处时,在递种口处种子失去护种盘的支持力,种子将在重力的影响下运动至导种盘的导种槽内,完成递种过程。在携种阶段中,种子随着导种盘的转动运动至投种口,完成携种过程。在投种阶段中,外壳内壁面对种子的支持力消失,种子在重力的作用下从投种口排出,完成整个排种过程。
2. 关键部件设计
2.1 种子的形状特征及尺寸
种子的形状特征及尺寸是排种器关键零部件结构设计的重要依据。本文选用‘郑单958’玉米种子为研究对象,根据玉米种子的形状特征将宽厚比大于1.5的定义为扁平种子,小于或等于1.5的定义为圆粒种子。然后根据玉米种子尺寸大小分为4类:大圆粒、小圆粒、大扁平、小扁平,其中l0和l1分别为圆粒种子和扁平种子的长度,w0和w1分别为圆粒种子和扁平种子的宽度,t0和t1分别为圆粒种子和扁平种子的厚度。选取
1000 粒玉米种子,使用游标卡尺测量它们的三轴尺寸,测量结果以及2种种子的占比如表1所示。表 1 玉米种子三轴尺寸和分布占比Table 1. Three-axis size and distribution proportion of corn seeds种子类型
Seed type大小
Size长度
Length宽度
Width厚度
Thickness占比/%
Proportion最小值
Min最大值
Max平均值
Avg最小值
Min最大值
Max平均值
Avg最小值
Min最大值
Max平均值
Avg圆粒
Round大 10.57 11.68 11.05 8.55 9.71 9.07 7.51 8.49 7.73 10.6 小 9.52 10.49 9.92 7.31 8.47 7.89 6.16 7.44 6.87 11.6 平均 9.52 11.68 10.34 7.31 9.71 8.77 6.16 8.49 7.06 22.2 扁平
Flat大 11.53 12.82 12.13 8.82 9.98 9.42 5.06 5.84 5.41 48.5 小 10.46 11.42 10.99 7.62 8.79 8.27 4.17 5.00 4.55 29.3 平均 10.42 12.82 11.68 7.62 9.98 9.15 4.17 5.84 5.06 77.8 2.2 排种盘结构设计
排种盘直径决定型孔插件的数量及分布,对整机性能至关重要。《农业机械设计手册》[23]中,机械式排种器的种盘直径通常取140~260 mm,不宜过大或过小。排种盘直径过小时,排种盘可分布型孔插件数量减少,排种器高速作业时转速提升,不利于排种均匀、稳定;排种盘直径过大时,型孔插件数目可增多,有利于降低排种器的工作转速,提高排种稳定性,但直径过大也会相应提升制造成本、装配难度及作业功耗。故本文综合考虑后选取排种盘外径d0为220 mm,内径d1为180 mm。
为实现型孔插件的径向滑动,排种盘上设计型孔插件的滑动槽,型孔插件在压缩弹簧的弹力作用下在滑动槽内可以径向滑动。同时排种盘上设有搅种齿用于搅动种室内的种群,在增加种群流动性的同时改变种群中种子的姿态,提高充种效率(图2)。
![]() 图 2 排种盘装配示意图d0:排种盘外径,d1:排种盘内径。Figure 2. Assembly schematic diagram of seed metering plated0: Outer diameter of seed metering plate, d1: Inner diameter of seed metering plate.
图 2 排种盘装配示意图d0:排种盘外径,d1:排种盘内径。Figure 2. Assembly schematic diagram of seed metering plated0: Outer diameter of seed metering plate, d1: Inner diameter of seed metering plate.2.3 限姿板结构设计
限姿板是配合排种盘与型孔插件形成限姿通道,在种子进入充种型孔前预先调控种子姿态,使种子以理想的姿态到达护种盘与型孔插件共同组成的充种型孔前端的预充种位置。限姿板确保排种器在高速作业时种子能够快速地充入充种型孔,从而保证排种器在高速作业时的充种速度和充种效果的稳定,提升排种性能。限姿板的装配展开图与剖视图如图3所示。
![]() 图 3 限姿板结构示意图u:限姿通道竖直距离,v:限姿通道倾斜距离,e:限姿通道夹角。Figure 3. Structural diagram of posture limiting plateu: Vertical distance of posture limiting channel, v: Inclination distance of posture limiting channel, e: Angle of posture limiting channel.
图 3 限姿板结构示意图u:限姿通道竖直距离,v:限姿通道倾斜距离,e:限姿通道夹角。Figure 3. Structural diagram of posture limiting plateu: Vertical distance of posture limiting channel, v: Inclination distance of posture limiting channel, e: Angle of posture limiting channel.由于种群中扁平种子的占比较大,所以选取扁平种子为主要研究对象。根据测量的玉米种子的三轴尺寸特征,可以发现扁平种子的长度均大于10 mm,宽度和厚度均小于10 mm。因此设计限姿通道竖直距离u为10 mm,限姿通道倾斜距离v为10 mm,为使种子顺利滑至预充种位置,限姿通道夹角e应大于种子的摩擦角(28°)加90°,即118°。综合考虑,设计夹角e为135°,使限姿板与排种盘和护种盘配合来限制调控玉米种子的充前姿态。
2.3.1 分级限姿引导过程分析
根据种子的分级限姿引导过程,把种子受限区域根据限姿板、排种盘以及护种盘的结构特征分为4个区域(图4)。
![]() 图 4 玉米种子分级限姿引导过程分析Figure 4. Analysis of staged posture control and guiding process for corn seeds
图 4 玉米种子分级限姿引导过程分析Figure 4. Analysis of staged posture control and guiding process for corn seeds首先是一级限姿引导,种子从Π形进种管进入种室后到达区域①,在区域①的种子姿态大致分为6种,分别为:正面平躺、侧面平躺、侧面竖立、正面竖立、底面竖立和底面平躺,其中正面平躺和侧面平躺2个姿态的扁平种子由于长度方向上垂直于排种盘,而区域②限姿通道竖直距离u为10 mm,所以这2种姿态的种子无法进入到区域②之中,因此进入区域②的种子姿态大致分为4种,分别是:侧面竖立、正面竖立、底面竖立和底面平躺。其次是二级限姿引导,区域③限姿通道倾斜距离v为10 mm,区域②与区域③的限姿通道夹角e为135°,所以区域②的正面竖立姿态的玉米种子无法进入到区域③之中,其余3个姿态则沿限姿板斜面滑跃进入区域③,所以区域③的种子姿态大致分为4种,分别是侧面竖立、侧面斜躺、底面竖立和底面斜躺。最后是三级限姿引导,区域③的种子在重力、离心力和种群间作用力的综合作用下,到达区域④的预充种位置,区域④的种子姿态大致分为4种,分别是侧面竖立、侧面平躺、底面竖立和底面平躺,从而实现了调整玉米种子进入充种型孔前姿态的目的,使种子更快更稳定地进入充种型孔。
2.3.2 种子运动轨迹力学分析
根据对种子分级限姿引导过程的分析,将种子的运动轨迹分为轨迹一与轨迹二2种情况(图5a)。并对限姿通道的4个区域内种子的运动过程进行受力分析(图5b)。
![]() 图 5 种子限姿过程中的运动轨迹与受力分析Fa:限姿板对种子的支持力,fa:种子与限姿板之间的摩擦力,Fb:排种盘对种子的支持力,fb:种子与排种盘之间的摩擦力,Fc:种子之间的接触力,Fe:型孔插件与种子之间的接触力,Fd1:护种盘底部对种子的支持力,Fd2:护种盘后侧对种子的支持力,Fr:种子受到的离心力,Fa’:限姿板对种子的支持力在y轴上的分力,G:种子所受重力。Figure 5. Motion trajectory and force analysis in the process of seed posture limitingFa: Seed support force by posture limiting plate, fa: Friction between seed and posture limiting plate, Fb: Seed support force by seed metering plate, fb: Friction between seed and seed metering plate, Fc: Contact force between seeds, Fe: Contact force between orifice plug and seed, Fd1: Seed support force by the bottom of seed protection plate, Fd2: Seed support force by the posterior side of seed protection plate, Fr: Centrifugal force on seed, Fa’: y-axis component of seed support force by posture limiting plate, G: Gravity on seed.
图 5 种子限姿过程中的运动轨迹与受力分析Fa:限姿板对种子的支持力,fa:种子与限姿板之间的摩擦力,Fb:排种盘对种子的支持力,fb:种子与排种盘之间的摩擦力,Fc:种子之间的接触力,Fe:型孔插件与种子之间的接触力,Fd1:护种盘底部对种子的支持力,Fd2:护种盘后侧对种子的支持力,Fr:种子受到的离心力,Fa’:限姿板对种子的支持力在y轴上的分力,G:种子所受重力。Figure 5. Motion trajectory and force analysis in the process of seed posture limitingFa: Seed support force by posture limiting plate, fa: Friction between seed and posture limiting plate, Fb: Seed support force by seed metering plate, fb: Friction between seed and seed metering plate, Fc: Contact force between seeds, Fe: Contact force between orifice plug and seed, Fd1: Seed support force by the bottom of seed protection plate, Fd2: Seed support force by the posterior side of seed protection plate, Fr: Centrifugal force on seed, Fa’: y-axis component of seed support force by posture limiting plate, G: Gravity on seed.在区域①中,种子受力为限姿板对种子的支持力Fa、种子与排种盘之间的摩擦力fb、种子与限姿板之间的摩擦力fa、种子之间的接触力Fc,向种子质心取距可得:
$$ \sum {M = } 0.5{l_1}({F_{\mathrm{c}}} - {f_{\mathrm{b}}}) + \frac{{\sqrt 2 }}{2}\Delta d({F_{\mathrm{a}}} - {f_{\mathrm{a}}}){\text{,}} $$ (1) 式中,M为种子受力×力臂所产生的使种子旋转的力矩,Δd为种子与限姿板接触点的质心距,l1为扁平种子的平均长度。
种子在排种盘径向(y轴向)的合力
${F_y} $ 与轴向(x轴向)的合力${F_x} $ 满足:$$ \left\{ \begin{gathered} \sum {{F_y} = G + {F_{\mathrm{r}}} + {F_{\mathrm{c}}} + \frac{{\sqrt 2 }}{2}({f_{\mathrm{a}}} - {F_{\mathrm{a}}}) - {f_{\mathrm{b}}} \geqslant 0} \\ \sum {{F_x} = {F_{\mathrm{b}}} - \frac{{\sqrt 2 }}{2}({F_{\mathrm{a}}} + {f_{\mathrm{a}}}) = 0} \\ \end{gathered} \right. {\text{,}}$$ (2) 其中,
$$ \left\{ \begin{gathered} G = mg \\ {f_{\mathrm{a}}} = \mu {F_{\mathrm{a}}} \\ {f_{\mathrm{b}}} = \mu {F_{\mathrm{b}}} \\ {F_{\mathrm{r}}} = m{\omega ^2}r \\ \end{gathered} \right.{\text{,}} $$ (3) 式中,m为玉米种子的质量,g为重力加速度,取9.8 m/s2,μ为种子与排种器间滑动摩擦因数,ω为排种器角速度,G为种子所受重力,r为种子受到的离心力半径,Fr为种子受到的离心力,Fb为排种盘对种子的支持力。
当种子即将调整姿态时,质心距
$\Delta d $ 约为种子长度的0.5倍,因此取Δd为0.5l1,代入公式(1)并联立公式(2)、(3),得到种子质心处的合力距大于0,因此种子将绕质心进行转动。完成姿态调控后,种子由区域①进入区域②。在区域②中,当长轴垂直于排种盘的种子完成调姿后,种子可以分为2种运动轨迹进行分析。
第2种是如图5轨迹一所示,种子姿态满足从区域②下落至区域③,此时种子在区域②中的Fy与Fx满足:
$$ \left\{ \begin{gathered} \sum {{F_y} = G + {F_r} + {F_c} \geqslant 0} \\ \sum {{F_x} = 0} \\ \end{gathered} \right.{\text{,}} $$ (4) 由式(4)可知,在合外力的作用下,此时种子将沿排种盘径向方向由区域②下落至区域③。
第2种是如图5轨迹二所示,种子姿态保持正面竖立,此时由于限姿板的角度e,部分大扁平种子将无法从区域②下落至区域③,此时种子受力为型孔插件与种子之间的接触力Fe、Fc,向种子质心取距可得
$$ \sum {M = } 0.5{l_1}{F_{\mathrm{c}}} + \Delta {d_2}{F_{\mathrm{e}}}\cos \varphi {\text{,}}$$ (5) 式中,Δd2 为种子与型孔插件接触点的质心距,φ 为型孔插件侧面角度。
种子的
${F_y} $ 与${F_x} $ 满足$$ \left\{ \begin{gathered} \sum {{F_y} = G + {F_{\mathrm{r}}} + {F_{\mathrm{e}}}\sin \varphi + {F_{\mathrm{a}}}' = 0} \\ \sum {{F_x} = 0.5{l_1}{F_{\mathrm{c}}} + \Delta {d_2}{F_{\mathrm{e}}}\cos \varphi \geqslant 0} \\ \end{gathered} \right. {\text{,}}$$ (6) 其中,
$$ {F_{\mathrm{a}}}' = \frac{{\sqrt 2 }}{2}{F_{\mathrm{a}}}{\text{,}} $$ (7) 式中,
${F_{\mathrm{a}}}' $ 为限姿板对种子的支持力在y轴上的分力。当种子即将调整姿态时,质心距
$\Delta d_2$ 约为种子长度的0.3倍,因此取Δd2为0.3l1,代入公式(5)并联立公式(3)、(6)、(7),得到种子质心处的合力距大于0,因此种子将绕质心进行转动。完成姿态调控后,种子以底面平躺姿态平躺在型孔插件上方。此时种子的
${F_y} $ 与${F_x} $ 满足$$ \left\{ \begin{gathered} \sum {{F_y} = G + {F_{\mathrm{r}}} + {F_{\mathrm{c}}} - {F_{\mathrm{e}}} = 0} \\ \sum {{F_x} = 0} \\ \end{gathered} \right. {\text{,}}$$ (8) 由式(8)可知,此时种子在排种盘径向截面中的合外力为0。而随着排种盘的转动,种子失去型孔插件的支持力Fe后,由区域②进入区域③。
在区域③中,部分保持侧面竖立姿态的大扁平种子在刚到达时,种子受力为Fb、Fa、fa、Fc,向种子质心取距可得:
$$ \sum {M = } \frac{{\sqrt 2 }}{4}{l_1}({F_{\mathrm{c}}} + {F_{\mathrm{a}}} - {f_{\mathrm{a}}}) + \Delta {d_1}{F_{\mathrm{b}}}{\text{,}} $$ (9) 式中,Δd1为种子与排种盘接触点的质心距。
种子的
${F_y} $ 与${F_x} $ 满足:$$ \left\{ \begin{gathered} \sum {{F_y} = G + {F_{\mathrm{r}}} + \frac{{\sqrt 2 }}{2}({F_{\mathrm{c}}} - {f_{\mathrm{a}}} - {F_{\mathrm{a}}}) - {f_{\mathrm{b}}} = 0} \\ \sum {{F_x} = \frac{{\sqrt 2 }}{2}({F_{\mathrm{a}}} + {F_{\mathrm{c}}} - {f_{\mathrm{a}}}) - {F_{\mathrm{b}}} \geqslant 0} \\ \end{gathered} \right. {\text{。}}$$ (10) 当种子即将调整姿态时,质心距
$\Delta d_1 $ 约为种子长度的0.5倍,因此取Δd1为0.5l1,代入公式(9)并联立公式(3)、(10),得到种子质心处的合力距大于0,因此种子将绕质心进行转动完成姿态调控。完成姿态调控后,区域③的种子在与限姿板接触面法线方向(y轴向)的合力
${F_y}' $ 和接触面方向(x轴向)的合力${F_x}' $ 满足:$$ \left\{ \begin{gathered} \sum {{F_y}' = \frac{{\sqrt 2 }}{2}(G + {F_{\mathrm{r}}}) - {F_{\mathrm{a}}} = 0} \\ \sum {{F_x}' = \frac{{\sqrt 2 }}{2}(G + {F_{\mathrm{r}}}) + {F_{\mathrm{c}}} - {f_{\mathrm{a}}} \geqslant 0} \\ \end{gathered} \right. {\text{,}}$$ (11) 由式(11)可知,完成姿态调控后的侧面竖立的大扁平种子与其余3种姿态的种子在合外力的作用下,沿种子在与限姿板接触面方向由区域③滑至区域④。
在区域④中,种子到达预充种位置后,种子在与护种盘接触面法线方向(y轴向)的合力
$F_y'' $ 和接触面方向(x轴向)的合力$F_x'' $ 满足:$$ \left\{ \begin{gathered} \sum {{F_y}'' = (G + {F_{\mathrm{r}}})\sin \alpha - {F_{d2}} = 0} \\ \sum {{F_x}'' = (G + {F_{\mathrm{r}}})\cos \alpha + {F_{\mathrm{c}}} - {F_{d1}} = 0} \\ \end{gathered} \right.{\text{,}} $$ (12) 式中,α为护种盘底部角度,Fd1为护种盘底部对种子的支持力,Fd2为护种盘后侧对种子的支持力。
由式(12)可知,种子到达预充种位置后,在排种盘径向截面中种子的合外力为0。随着排种盘的转动,种子准备进入充种型孔,完成充种过程。
2.4 充种型孔结构设计
2.4.1 充种型孔填充姿态分析
为了达到单粒精密播种的要求,排种器在工作时应能将有且仅有一粒种子填入充种型孔内。如果充种型孔足够大,种子在充种型孔内的姿势可以大致分为6种:正面竖立、侧面竖立、底面竖立、正面平躺、侧面平躺、底面平躺。此时这个充种型孔满足种子的各种填充姿态,但是充种型孔就会很大,充种时会将多粒种子侧充进入充种型孔中,这将严重降低排种器的性能,大大增加排种器作业时的重播率。因此,在设计充种型孔时,必须选择理想的充填姿态,以达到只充填一粒种子的目的。
2.4.2 侧充过程分析
充种型孔的结构与尺寸大小应依据充入型孔内的种子姿态来确定。当种子呈正面竖立、侧面竖立、正面平躺或侧面平躺时,它们的长度方向均垂直于型孔插件与护种盘构成的充种型孔的下底面和左侧面,这将导致充种型孔过大,无法确保在清种后孔内仅剩1粒种子。因此,选择保留底面竖立和底面平躺这2种姿态,并通过调整护种盘与型孔插件的结构参数来限制或调整其他4种姿态。
种子经过限姿板限制姿态之后到达区域④的预充种位置,预充种位置的种子会随着排种盘的转动进行姿态调整,然后侧充进入充种型孔内直至达到稳定状态。如图6所示,底面平躺姿态的种子随着排种盘的转动,直接充入充种型孔。侧面平躺姿态的种子随着排种盘的转动,当种子与型孔插件发生接触时,型孔插件会对种子施加一个推力F2。由于种子与型孔的接触点在种子的边缘区域,支持力的作用点与种子质心之间存在一定距离,此时产生力矩M2。在M2的作用下,种子姿态被调整为底面平躺姿态,使其能够顺利进入充种型孔,随后通过排种盘的转动被充入充种型孔。对于底面竖立和侧面竖立姿态的种子,它们受到种群间其他种子的一个作用力Fc和护种盘上斜面的支持力F3,此时会产生力矩M3,在M3的作用下,种子姿态分别被调整为底面斜躺和侧面斜躺2个姿态,最终随着排种盘的转动侧充进入充种型孔并达到稳定姿态。
![]() 图 6 种子由区域④侧充进入充种型孔的充种过程及稳定姿态F2:型孔插件对种子的推力,Fc:种子之间的接触力,F3:护种盘上斜面对种子的支持力,M2:F2产生的力矩,M3:Fc与F4产生的力矩。Figure 6. Seed filling process and stable posture from region ④ to the filling orifice through side-fillingF2: Thrust of the orifice plug on the seed, Fc: Contact force between seeds, F3: Supporting force of the inclined plane on seed protection plate to the seed, M2: Torque generated by F2, M3: Torque generated by Fc and F4.
图 6 种子由区域④侧充进入充种型孔的充种过程及稳定姿态F2:型孔插件对种子的推力,Fc:种子之间的接触力,F3:护种盘上斜面对种子的支持力,M2:F2产生的力矩,M3:Fc与F4产生的力矩。Figure 6. Seed filling process and stable posture from region ④ to the filling orifice through side-fillingF2: Thrust of the orifice plug on the seed, Fc: Contact force between seeds, F3: Supporting force of the inclined plane on seed protection plate to the seed, M2: Torque generated by F2, M3: Torque generated by Fc and F4.2.4.3 型孔结构参数设计
由于型孔插件与护种盘共同组成的充种型孔直接与种子接触,因此,这2个零件结构的形状和参数对排种器工作性能有着重要的影响。
型孔插件结构形状如图7c所示,护种盘结构形状如图7b所示,两者结构参数中与充种型孔相关的是型孔插件顶部宽度W、型孔插件底部角度α0、型孔插件底部长度L0、型孔插件前侧高度H0、型孔插件顶部角度β0、和型孔插件侧面角度φ,护种盘后侧高度H、护种盘底部长度L、护种盘底部角度α、护种盘顶部角度β。
![]() 图 7 护种盘与型孔插件的结构参数设计α:护种盘底部角度,β:护种盘顶部角度,c:护种板顶部厚度,H:护种盘后侧高度,L:护种盘底部长度,α0:型孔插件底部角度,β0:型孔插件顶部角度,L0:型孔插件底部长度,H0:型孔插件前侧高度,b:型孔插件后侧厚度,e0:型孔插件后侧角度,c0:型孔插件后侧高度,W:型孔插件顶部宽度,φ:型孔插件侧面角度。Figure 7. kinds of plate type and structure parameters of hole plug-in protection designα: Bottom angle of seed protection plate, β: Top angle of seed protection plate, c: Top thickness of seed protection plate, H: Rear height of seed protection plate, L: Bottom length of seed protection plate, α0: Bottom angle of orifice plug, β0: Top angle of orifice plug, L0: Bottom length of orifice plug, H0: Front height of orifice plug, b: Rear thickness of orifice plug, e0: Rear angle of orifice plug, c0: Rear height of orifice plug, W: Top width of orifice plug, φ: Side angle of orifice plug.
图 7 护种盘与型孔插件的结构参数设计α:护种盘底部角度,β:护种盘顶部角度,c:护种板顶部厚度,H:护种盘后侧高度,L:护种盘底部长度,α0:型孔插件底部角度,β0:型孔插件顶部角度,L0:型孔插件底部长度,H0:型孔插件前侧高度,b:型孔插件后侧厚度,e0:型孔插件后侧角度,c0:型孔插件后侧高度,W:型孔插件顶部宽度,φ:型孔插件侧面角度。Figure 7. kinds of plate type and structure parameters of hole plug-in protection designα: Bottom angle of seed protection plate, β: Top angle of seed protection plate, c: Top thickness of seed protection plate, H: Rear height of seed protection plate, L: Bottom length of seed protection plate, α0: Bottom angle of orifice plug, β0: Top angle of orifice plug, L0: Bottom length of orifice plug, H0: Front height of orifice plug, b: Rear thickness of orifice plug, e0: Rear angle of orifice plug, c0: Rear height of orifice plug, W: Top width of orifice plug, φ: Side angle of orifice plug.其中φ的设计主要是为了减小初始清种角,同时确保不影响充种效果。综合考虑,选取φ=15°。为了确保充种型孔的充种效果,型孔插件和护种盘与充种型孔相关的结构参数之间需要满足下式:
$$ \left\{ \begin{gathered} \alpha = {\alpha _0} \\ \beta = {\beta _0} \\ L = {L_0} + 0.5 \\ H = {H_0} + 0.5 \\ \end{gathered} \right.{\text{,}} $$ (13) 式中,0.5为型孔插件与护种盘的配合间隙宽度。
其余结构参数分别为型孔插件后侧厚度b、型孔插件后侧角度e0、型孔插件后侧高度c0、护种板顶部厚度c。结合限姿板与排种盘的尺寸特征,综合考虑,取b为9.5 mm,e0为135°,c0为2 mm。为了保证后期台架试验材料制作的护种盘质量,综合考虑,取c为3 mm。
为了确保充种型孔不仅适用于扁平种子,还能有效充入圆粒种子,通过对比扁平种子与圆粒种子的形状特征得到护种盘顶部角度β需要满足下式:
$$ \frac{{{w_0} - {t_1}}}{{0.5{w_0}}} < \tan (180 - \beta ) $$ (14) 式中,w0为圆粒种子的平均宽度,t1为扁平种子的平均厚度。
根据公式(14)求得β<49.77°。β不仅影响充种阶段的充种效果,而且对清种阶段有影响,因此,综合考虑,取β=45°。
充种型孔的参数取值应依据充入型孔内的种子姿态决定,由图6的侧充过程分析结合扁平种子与圆粒种子的形状特征,对型孔插件与护种盘的结构参数进行设计。
如图8的扁平种子和圆粒种子与充种型孔的结构示意图所示,充种型孔同时满足充入扁平种子与圆粒种子条件时,参数H、L、α应满足下式:
![]() 图 8 扁平种子(a)和圆粒种子(b)与充种型孔的结构示意图α:护种盘底部角度,β:护种盘顶部角度,H:护种盘后侧高度,L:护种盘底部长度,w0:圆粒种子宽度,t1:扁平种子厚度,w1:扁平种子宽度。Figure 8. Structural diagram of seed-filling orifices with flat seed (a) and round seed(b)α: Bottom angle of seed protection plate, β: Top angle of seed protection plate, H: Rear height of seed protection plate, L: Bottom length of seed protection plate, w0: Round seed width, t1: Flat seed thickness, w1: Flat seed width.
图 8 扁平种子(a)和圆粒种子(b)与充种型孔的结构示意图α:护种盘底部角度,β:护种盘顶部角度,H:护种盘后侧高度,L:护种盘底部长度,w0:圆粒种子宽度,t1:扁平种子厚度,w1:扁平种子宽度。Figure 8. Structural diagram of seed-filling orifices with flat seed (a) and round seed(b)α: Bottom angle of seed protection plate, β: Top angle of seed protection plate, H: Rear height of seed protection plate, L: Bottom length of seed protection plate, w0: Round seed width, t1: Flat seed thickness, w1: Flat seed width.$$ \left\{ \begin{gathered} {t_{1\min }} \leqslant H \leqslant {t_{1\max }} \\ {w_{1\max }} \leqslant L \leqslant {l_{1\min }} \\ {w_0} \leqslant \frac{{0.5L}}{{\tan \beta }} + H - \frac{{0.5L}}{{\tan \alpha }} \\ \tan \alpha \leqslant {90^{\text{o}}} \\ \end{gathered} \right. {\text{,}}$$ (15) 式中,w1max 为扁平种子宽度最大值,t1min 为扁平种子厚度最小值,t1max 为扁平种子厚度最大值,l1min 为扁平种子长度最小值。
通过公式(15)得到L的范围为9.98~10.42 mm,H的范围为4.17~5.86 mm,α的范围为76.02°~90.00°。综合考虑,取L=10 mm,而由于H和α取值范围过大,为了提高充种型孔对种子的适应性,H和α的取值依据具体试验优化结果。
根据侧充过程分析结果得到扁平种子侧面斜躺与底面平躺充种型孔的结构示意图(图9)。为了保证排种盘转动时充种型孔能够顺利充种与清种阶段充种型孔内的种子不掉落,则型孔插件顶部宽度
$W $ 的优选范围应靠近种子的质心,即应满足下式:![]() 图 9 扁平种子侧面斜躺(a)和底面斜躺(b)与充种型孔的结构示意图W:型孔插件顶部宽度,φ:型孔插件侧面角度,w1:扁平种子宽度,l1:扁平种子长度。Figure 9. Structural diagram of seed filling orifices with flat seeds in lateral oblique(a) and basal oblique(b) posturesW: Top width of orifice plug, φ: Side angle of orifice plug, w1: Flat seed width, l1: Flat seed length.
图 9 扁平种子侧面斜躺(a)和底面斜躺(b)与充种型孔的结构示意图W:型孔插件顶部宽度,φ:型孔插件侧面角度,w1:扁平种子宽度,l1:扁平种子长度。Figure 9. Structural diagram of seed filling orifices with flat seeds in lateral oblique(a) and basal oblique(b) posturesW: Top width of orifice plug, φ: Side angle of orifice plug, w1: Flat seed width, l1: Flat seed length.$$ 0.5{w_{1\min }} \leqslant W \leqslant 0.5{l_{1\max }}{\text{,}} $$ (16) 式中,w1min 为扁平种子宽度最小值,l1max 为扁平种子长度最大值。
通过公式(16)得到W的范围为3.81~6.41 mm。由于W取值范围过大,为了提高充种型孔对种子的适应性,提高清种效果,W的取值依据具体试验优化结果。
2.4.4 型孔插件数量分布
排种器在满足充种、清种、递种、携种和投种5个工作阶段的需求下,应尽量增多型孔插件的数量,以便降低排种盘工作转速并提高投种频率,进而提高排种器的作业速度。型孔插件数量分布相关参数如图10所示。
![]() 图 10 型孔插件数量分布相关参数r1:导种槽递种口位置半径,q:递种口位置宽度,k:相邻两型孔插件的距离,i:导种槽两侧厚度。Figure 10. Parameters related to the quantity distribution of the orifice plugsr1: Radius at seed delivery port of seed guiding channel, q: Width of seed delivery port, k: Distance between two adjacent orifices, i: Thickness at both sides of seed guiding channel.
图 10 型孔插件数量分布相关参数r1:导种槽递种口位置半径,q:递种口位置宽度,k:相邻两型孔插件的距离,i:导种槽两侧厚度。Figure 10. Parameters related to the quantity distribution of the orifice plugsr1: Radius at seed delivery port of seed guiding channel, q: Width of seed delivery port, k: Distance between two adjacent orifices, i: Thickness at both sides of seed guiding channel.为确保种子能够及时到达预充种位置,相邻两型孔插件的距离
$k $ 应大于1.5倍的种子最大长度,同时为了保证种子递种时能够顺利进入导种盘的导种槽内,导种槽的递种口位置宽度$q $ 应大于种子最大长度,即型孔插件数量$z $ 需满足下式$$ \left\{ \begin{array}{l} \dfrac{{{\text{π}} {d_1}}}{{\textit{z}}} - {d_1}\arcsin \left( {\dfrac{{{W_{\max }}}}{{{d_1}}}} \right) > {d_1}\arcsin \left( {\dfrac{k}{{{d_1}}}} \right) \\ \dfrac{{2{\text{π}} {r_1}}}{{2{\textit{z}}}} - 2{r_1}\arcsin \left( {\dfrac{i}{{2{r_1}}}} \right) > 2{r_1}\arcsin \left( {\dfrac{q}{{2{r_1}}}} \right) \end{array} \right. $$ (17) 式中,r1 为导种槽递种口位置半径,Wmax 为型孔插件顶部宽度最大值,i 为导种槽两侧厚度。
取i =3 mm,r1=95 mm,根据式(17)求得z<18.86,综合考虑,取z=18。
2.5 护种盘径向突变结构设计
根据侧充过程分析,当充种状态稳定之后,充种型孔内种子姿态大致分为3种,而底面平躺姿态下充种型孔内的剩余空间可能会有部分较小的种子卡入,导致种子难以利用自重快速完成清种,所以需要考虑底面平躺姿态的清种问题。
因此,设计一个径向突变结构辅助种子自重清种,从而加快清种速度,以达到减小重播指数的目的。如图11所示,型孔插件经过径向突变结构时,在压缩弹簧的弹力作用下实现变径。保留种子受到型孔插件对种子的摩擦力f1,减小了对待清种子的压力。待清种子受到型孔插件对种子的摩擦力f2,同时受到重力G,此时会产生力矩M4,最后种子在力矩M4的辅助下沿护种盘斜面下滑,达到快速清种的目的。
![]() 图 11 径向突变辅助清种分析f1:型孔插件对保留种子的摩擦力,f2:型孔插件对待清种子的摩擦力,M4:f2与G产生的力矩,G:种子所受重力。Figure 11. Analysis of seed cleaning assisted by radial mutationf1: Frictional force of orifice plug on retained seed, f2: Frictional force of orifice plug on the seed to be cleared, M4: Torque generated by f2 and G, G: Gravity on the seed.
图 11 径向突变辅助清种分析f1:型孔插件对保留种子的摩擦力,f2:型孔插件对待清种子的摩擦力,M4:f2与G产生的力矩,G:种子所受重力。Figure 11. Analysis of seed cleaning assisted by radial mutationf1: Frictional force of orifice plug on retained seed, f2: Frictional force of orifice plug on the seed to be cleared, M4: Torque generated by f2 and G, G: Gravity on the seed.为了保证甩出的型孔插件能够在及时复位,设计1个护种盘椭圆结构将型孔插件推回原位,如图12a所示,其中椭圆短轴a为护种盘圆周半径R,长轴b为护种盘圆周半径R加上径向突变宽度p。护种盘径向突变轮廓曲线如图12b所示。
![]() 图 12 护种盘径向突变轮廓曲线设计a:椭圆短轴,b:椭圆长轴,R:护种盘圆周半径,p:径向突变宽度,θ:径向突变起始角度。Figure 12. Design of radial abrupt contour curve of seed protection platea: Short axis of ellipse, b: Long axis of ellipse, R: Radius of seed protection plate, p: Radial mutation width, θ: Radial mutation starting angle.
图 12 护种盘径向突变轮廓曲线设计a:椭圆短轴,b:椭圆长轴,R:护种盘圆周半径,p:径向突变宽度,θ:径向突变起始角度。Figure 12. Design of radial abrupt contour curve of seed protection platea: Short axis of ellipse, b: Long axis of ellipse, R: Radius of seed protection plate, p: Radial mutation width, θ: Radial mutation starting angle.为了更好地辅助种子自重清种,避免影响递种过程,综合考虑,径向突变起始角度θ取65°,p取1.5 mm。
3. 充种型孔参数优化仿真试验
充种型孔的结构参数是影响排种质量的重要因素。为了确定充种型孔的最佳结构参数组合,设计了基于DEM-MBD耦合参数优化仿真试验。
3.1 仿真模型的建立
3.1.1 物理参数设置
为了保证仿真模拟结果的准确性,需要获取排种器和玉米种子的物理参数与接触参数。排种器与种子接触的关键部件的材料均为树脂。根据前期试验得到种子的泊松比、剪切模量和密度分别为0.4、1.37×108 Pa和
1197 kg·m−3。树脂的泊松比、剪切模量和密度分别为0.5、1.77×108 Pa和1180 kg·m−3。种子间的碰撞恢复系数、静摩擦系数和动摩擦系数分别为0.18、0.03和0.01。种子与树脂间的碰撞恢复系数、静摩擦系数和动摩擦系数分别为0.71、0.46和0.09。3.1.2 玉米种子模型建立
本研究中,DEM方法是基于EDEM 2021软件来完成的。为了使模拟更真实,选取‘郑单958’玉米杂交种作为建模对象,在EDEM中采用颗粒填充法将种子分别填充建模,如图13所示。
![]() 图 13 基于‘郑单958’玉米不同类型种子的填充模型Figure 13. Filling models based on ‘Zhengdan 958’ corn seeds with different types
图 13 基于‘郑单958’玉米不同类型种子的填充模型Figure 13. Filling models based on ‘Zhengdan 958’ corn seeds with different types3.1.3 仿真模型建立
本研究中,DEM-MBD方法是基于EDEM 2021与RecurDyn 2023软件来完成的。首先将SolidWorks中将装配好的排种器三维模型转化为x-t格式,导入至RecurDyn中,利用RecurDyn 对机构添加joint、force、contact等仿真参数。参数设置完成后,利用RecurDyn 中External SPI功能模块下的EDEM接口模块将各部件以wall.文件形式导出。在EDEM中Geometries模块下的Import Geometry from RecurDyn 功能将RecurDyn中生成的wall.文件导入。然后在EDEM中建立颗粒工厂生成颗粒,颗粒工厂在1 s内生成全部所需玉米籽粒。仿真完成后,在菜单栏File的Export功能下的Simulation Deck导出生成一个input文件,勾选Set Simulation Time并设置成为0 s。然后打开input文件,设置Fixed Time Step为1×10−6 s,最后打开RecurDyn的Analysis功能模块下的Dyn/Kin,设置仿真时间为20 s,step为1 000进行耦合仿真。
为了能对种子排种时间间隔进行检测,在落种口处设置收集器,并通过EDEM后处理功能添加监测器,记录种子与前一颗种子的排出时间间隔,如图14所示。参照《单粒(精密)播种机试验方法》(GB/T 6973-2005)[24],排种时间间隔在0.5~1.5倍理论时间间隔的为合格,排种时间间隔大于1.5倍理论时间间隔的为漏播,排种时间间隔小于0.5倍理论时间间隔的为漏播。根据计算,当播种株距为25 cm、作业速度为12 km/h时,理论排种时间间隔为0.075 s,则当时间间隔小于0.039 s时为重播,时间间隔在0.039~0.113 s之间的为合格,时间间隔大于0.113 s的为漏播。
![]() 图 14 排种器EDEM后处理1:种子填充模型,2:排种器模型,3:收集器,4:监测器,5:收集器内种子质量。Figure 14. EDEM post-processing for seed metering device1: Seed filling model, 2: Seed metering device model, 3: Collector, 4: Monitor, 5: Seed mass in the collector.
图 14 排种器EDEM后处理1:种子填充模型,2:排种器模型,3:收集器,4:监测器,5:收集器内种子质量。Figure 14. EDEM post-processing for seed metering device1: Seed filling model, 2: Seed metering device model, 3: Collector, 4: Monitor, 5: Seed mass in the collector.3.2 参数优化仿真试验
3.2.1 试验因素与试验指标
根据前面的理论分析选定型孔插件顶部宽度W、护种盘后侧高度H、护种盘底部角度α为影响排种器工作性能的主要因素,以合格指数Y1、重播指数Y2和漏播指数Y3为试验指标,以251粒种子为1组,记录其排种时间间隔,共250个时间间隔,每组试验重复3次,取平均值;各个指标的计算公式为:
$$ \left\{ {\begin{array}{*{20}{c}} {\mathop Y\nolimits_1 = \dfrac{{{{{n}}_1}}}{N} \times 100{\text{%}} } \\ {\mathop Y\nolimits_2 = \dfrac{{{{{n}}_2}}}{N} \times 100{\text{%}} } \\ {\mathop Y\nolimits_3 = \dfrac{{{{{n}}_3}}}{N} \times 100{\text{%}} } \end{array}} \right. {\text{,}}$$ (18) 式中,n1为排种时间间隔在0.5~1.5倍理论时间间隔的排种数,n2为排种时间间隔大于1.5倍理论时间间隔的排种数,n3为排种时间间隔小于0.5倍理论时间间隔的排种数,N为理论排种数。
3.2.2 试验方案
根据充种型孔结构参数对排种影响的理论分析,选取试验因素的取值范围为:根据前面的理论分析选定W为3.81~6.41 mm、H为4.17~5.86 mm、α为76.02°~90.00°。针对上述关键因素开展三因素五水平二次正交旋转回归组合试验,试验编码表如表2 所示。
表 2 排种试验因素和水平Table 2. Factors and levels of seed metering experiment水平
Level因素1) Factor X1/mm X2/mm X3/(°) 1.682 6.41 5.86 90.00 1 5.88 5.52 87.17 0 5.11 5.02 83.01 −1 4.34 4.52 78.85 −1.682 3.81 4.17 76.02 1) X1:型孔插件顶部宽度,X2:护种盘后侧高度,X3:护种盘底部角度。
1) X1: Top width of orifice plug, X2: Rear height of seed protection plate, X3: Bottom angle of seed protection plate.3.2.3 试验结果与分析
基于EDEM和RecurDyn耦合仿真的二次正交旋转回归组合试验的试验方案与结果如表3 所示,利用Design-expert 13 软件对试验结果进行回归分析,试验因素对试验指标的显著性检测结果见表4。
表 3 排种试验方案及试验结果Table 3. Design and result of seed metering experiment试验编号
Test number因素1) Factor 评价指标 Evaluation index X1/mm X2/mm X3/(°) 合格指数/%
Qualified index重播指数/%
Replay index漏播指数/%
Leakage index1 −1 −1 −1 91.47 2.28 6.25 2 1 −1 −1 86.46 8.71 4.83 3 −1 1 −1 92.16 4.14 3.70 4 1 1 −1 85.48 12.06 2.46 5 −1 −1 1 88.73 8.45 2.82 6 1 −1 1 82.74 15.11 2.15 7 −1 1 1 83.27 15.41 1.32 8 1 1 1 78.56 20.21 1.23 9 −1.682 0 0 91.95 3.85 4.20 10 1.682 0 0 82.43 16.03 1.54 11 0 −1.682 0 86.26 8.48 5.26 12 0 1.682 0 82.58 15.63 1.79 13 0 0 −1.682 91.21 3.83 4.96 14 0 0 1.682 82.12 16.23 1.65 15 0 0 0 91.92 6.25 1.83 16 0 0 0 90.61 6.77 2.62 17 0 0 0 89.54 7.96 2.50 18 0 0 0 90.24 7.58 2.18 19 0 0 0 90.16 7.91 1.93 20 0 0 0 91.39 6.93 1.68 21 0 0 0 90.29 7.60 2.11 22 0 0 0 91.57 6.57 1.86 23 0 0 0 90.18 8.01 1.81 1) X1:型孔插件顶部宽度,X2:护种盘后侧高度,X3:护种盘底部角度。
1) X1: Top width of orifice plug, X2: Rear height of seed protection plate, X3: Bottom angle of seed protection plate.根据表4 可知,合格指数、重播指数以及漏播指数的回归模型均为极显著(P<0.01),失拟项均不显著(P>0.05),表明回归模型的拟合程度较高,且模型的R2 均大于0.92,表明模型可以解释评价指标超过92% 的变化。对于合格指数回归模型,X1、X2、X3、X2X3、X12、X22 和X32 均为极显著,其余项均不显著;对于重播指数回归模型,X1、X2、X3、X2X3、X12、X22 和X32 均为极显著,其余项均为不显著;对于漏播指数回归模型,X1、X2、X3、X22和X32均为极显著,X2X3、X12为显著,其余项均不显著。
表 4 模型方差分析Table 4. Variance analysis of model方差来源
Variation source合格指数 Qualified index 重播指数 Replay index 漏播指数 Leakage index 平方和 SS Df F P1) 平方和 SS Df F P1) 平方和 SS Df F P1) 模型 Model 363.36 9 81.25 < 0.0001 **502.41 9 125.11 < 0.0001 **42.65 9 37.14 < 0.0001 **X1 107.98 1 217.29 < 0.0001 **156.93 1 351.7 < 0.0001 **4.56 1 35.76 < 0.0001 **X2 19.03 1 38.29 < 0.0001 **62.84 1 140.83 < 0.0001 **12.71 1 99.64 < 0.0001 **X3 103.29 1 207.85 < 0.0001 **204.48 1 458.26 < 0.0001 **17.11 1 134.12 < 0.0001 **X1X2 0.02 1 0.04 0.8479 0.02 1 0.04 0.8478 0.07 1 0.57 0.4653 X1X3 0.12 1 0.25 0.6278 1.04 1 2.34 0.1501 0.45 1 3.54 0.0826 X2X3 10.93 1 21.99 0.0004 **5.87 1 13.14 0.0031 **0.78 1 6.12 0.0279 *X12 21.54 1 43.35 < 0.0001 **13.47 1 30.18 0.0001 **0.94 1 7.4 0.0175 *X22 73.02 1 146.94 < 0.0001 **44.23 1 99.12 < 0.0001 **3.59 1 28.13 0.0001 **X33 28.96 1 58.27 < 0.0001 **14.41 1 32.3 < 0.0001 **2.51 1 19.68 0.0007 **残差 Residual 6.46 13 5.8 13 1.66 13 失拟 Lack of fit 1.46 5 0.47 0.7909 2.27 5 1.03 0.4618 0.82 5 1.56 0.2751 误差 Error 5 8 3.53 8 0.84 8 总和 Total 369.82 22 508.21 22 44.30 22 1) **表示影响极显著 (P<0.01);*表示影响显著 (P<0.05)。
1) ** indicates extremely significant influence (P<0.01); * indicates significant influence (P<0.05).剔除回归方程中影响不显著因素的系数,建立评价指标与试验因素的二次回归方程为
$$ \left\{ \begin{gathered} {Y_1} = 90.65 - 2.81{X_1} - 1.18{X_2} - 2.75{X_3} -\\ \quad\quad 1.17{X_2}{X_3} - 1.16X_1^2 - 2.14X_2^2 - 1.35X_3^2 \\ {Y_2} = 7.29 + 3.39{X_1} + 2.15{X_2} + 3.87{X_3} +\\ \quad\quad 0.86{X_2}{X_3} + 0.92X_1^2 + 1.67X_2^2 + 0.95X_3^2 \\ {Y_3} = 2.06 - 0.58{X_1} - 0.96{X_2} - 1.12{X_3} +\\ \quad\quad 0.31{X_2}{X_3} + 0.24X_1^2 + 0.48X_2^2 + 0.40X_3^2 \\ \end{gathered} \right.{\text{。}} $$ (19) 为了探究试验因素对各指标的影响,分析仿真过程中结构参数的变化导致重播和漏播的原因,利用Design expert 13 软件绘制试验因素交互作用显著的响应曲面,如图15所示。
![]() 图 15 因素间交互作用对排种器性能影响的响应曲面Figure 15. Response surface of influence of interaction between factors on performance of seed metering device
图 15 因素间交互作用对排种器性能影响的响应曲面Figure 15. Response surface of influence of interaction between factors on performance of seed metering device由表4和图15a可知,护种盘后侧高度与护种盘底部角度的交互项X2X3对合格指数的影响极显著。当型孔插件顶部宽度一定时,随着护种盘底部角度和护种盘后侧高度的增大,从而种子进入充种型孔的难度减小,有利于种子的充填,所以合格指数增大,但随着充种型孔的一直增大,则容易发生2粒种子同时进入充种型孔,所以合格指数减小,从而导致合格指数先增大后减小。
由表4和图15b可知,护种盘后侧高度与护种盘底部角度的交互项X2X3对重播指数的影响极显著。当型孔插件顶部宽度一定时,随着护种盘底部角度和护种盘后侧高度的增大,充种型孔逐渐变大,则容易发生2粒种子同时进入充种型孔,从而导致重播指数一直增大。
由表4和图15c可知,护种盘后侧高度与护种盘底部角度的交互项X2X3对漏播指数的影响显著。当型孔插件顶部宽度一定时,随着护种盘底部角度和护种盘后侧高度的减小,充种型孔逐渐减小,则充种时种子进入充种型孔难度增加,从而导致漏播指数一直增大。
为得到该排种器在高速作业条件下的充种型孔最优结构参数组合,以合格指数最大、重播与漏播指数最小为优化目标,对试验指标进行优化求解,目标函数与约束条件为:
$$ \left\{ \begin{gathered} \max {Y_1}\left( {{X_1},{X_2},{X_3}} \right) \\ \min {Y_2}\left( {{X_1},{X_2},{X_3}} \right) \\ \min {Y_3}\left( {{X_1},{X_2},{X_3}} \right) \\ {\mathrm{s.t.}}\left\{ \begin{gathered} 3.81\;{\mathrm{mm}} \leqslant W \leqslant 6.41\;{\mathrm{mm}} \\ 4.17\;{\mathrm{mm}} \leqslant H \leqslant 5.86\;{\mathrm{mm}} \\ {76.02^ \circ } \leqslant \alpha \leqslant {90.00^ \circ } \\ \end{gathered} \right. \\ \end{gathered} \right. {\text{,}}$$ (20) 求解得出型孔插件顶部宽度W为4.65 mm、护种盘后侧高度H为5.10 mm、护种盘底部角度α为81.86°时,排种质量最优,此时排种合格指数、重播指数和漏播指数分别为92.41%、4.88%和2.71%。为验证优化结果的准确性,在相同条件下进行3 组仿真试验,结果取平均值,得到排种器的合格指数、重播指数和漏播指数分别为92.18%、5.13% 和2.69%,接近预测值,说明二次正交旋转回归组合试验的优化结果准确。
3.2.4 种子受力破碎风险分析
在排种器工作过程中,随着作业速度的提高,种子受到的部件载荷大小也会随之发生变化。因此,为了得到排出的种子所受最大载荷对种子破碎的影响,在W为4.65 mm、H为5.10 mm、α为81.86°的条件下,作业速度分别为8、10、12、14、16 km/h时,分别统计4类种子在排出过程中所受的最大合力,每类种子各取50粒,取平均值并绘制点线图,如图16所示。
![]() 图 16 4类种子所受合力与作业速度的关系Figure 16. Relationship between the resultant force on four types of seeds and the operation speed
图 16 4类种子所受合力与作业速度的关系Figure 16. Relationship between the resultant force on four types of seeds and the operation speed由图16可以看出:随着作业速度的提高,4类种子排出过程中所受合力总体均呈现上升趋势,且种子所受合力的最大值出现在作业速度16 km/h下的小扁平种子,为6.27 N。籽粒抗压碎力与籽粒抗剪切力是影响破碎率的2个重要指标。经过查阅文献可知,玉米品种‘郑单958’的抗压碎力为105 N,抗剪切力为71.2 N[25],均显著高于种子所受合力的最大值。这表明双列限姿导引侧充式排种器在当前试验条件下,种子的破碎风险较低。
4. 台架性能验证试验
4.1 试验材料与装置
为了验证仿真试验的可靠性,开展台架性能验证试验,同时验证排种器在不同作业速度下的排种性能,试验台架如图17 所示。
![]() 图 17 排种器试验台架1:操控台,2:MeterMax ultra 性能检测器,3:排种器,4:光电传感器,5:变压器,6:收集器,7:充种型孔装配,8:径向突变,9:护种盘,10:排种盘装配,11:排种盘,12:滑动槽。Figure 17. Test bench of seed metering device1: Console, 2: MeterMax ultra performance detector, 3: Seed metering device, 4: Photoelectric sensor, 5: Transformer, 6: Collector, 7: Seed filling orifice assembly, 8: Radial mutation, 9: Seed protection plate, 10: Seed metering plate assembly, 11: Seed metering plate, 12: Slide groove.
图 17 排种器试验台架1:操控台,2:MeterMax ultra 性能检测器,3:排种器,4:光电传感器,5:变压器,6:收集器,7:充种型孔装配,8:径向突变,9:护种盘,10:排种盘装配,11:排种盘,12:滑动槽。Figure 17. Test bench of seed metering device1: Console, 2: MeterMax ultra performance detector, 3: Seed metering device, 4: Photoelectric sensor, 5: Transformer, 6: Collector, 7: Seed filling orifice assembly, 8: Radial mutation, 9: Seed protection plate, 10: Seed metering plate assembly, 11: Seed metering plate, 12: Slide groove.试验选用未分级的‘郑单958’玉米杂交种作为研究对象,千粒质量351 g,含水率12.5%。试验地点为云南师范大学能源与环境科学学院D-02实验室。试验使用的排种器主要零部件通过光固化3D 打印技术加工而成,材料为光敏树脂,其余轴类零部件使用45号钢机加工;试验检测装置使用MeterMax ultra排种器性能检测仪(美国P&C Ag Solutions),得到排种器的排种合格指数、重播指数和漏播指数。
4.2 作业速度适应性试验
为了体现本排种器在不同作业速度下的适应性,将作业速度分为3个速度范围,低速:8~10 km/h,中速:11~13 km/h,高速:14~16 km/h,在W为4.65 mm、H为5.10 mm、α为81.86°时,分别在3个作业范围下进行试验,每组重复5次取平均值,试验结果如表5所示。
表 5 作业速度适应性试验结果Table 5. Results of operation speed adaptability test速度
Speed作业速度/(km·h−1)
Working speed评价指标/%
Evaluation index合格指数
Qualified
index重播指数
Replay
index漏播指数
Leakage
index低
Low8 92.44 4.37 3.19 9 93.05 4.21 2.74 10 92.53 4.65 2.82 中
Moderate11 92.09 4.90 3.01 12 91.45 5.05 3.50 13 91.52 5.17 3.31 高
High14 91.04 5.52 3.44 15 90.11 6.26 3.63 16 90.57 6.01 3.42 由作业速度适应性试验结果可知,在作业速度12 km/h 时,排种合格指数为91.45%,与仿真试验的结果基本吻合,两者相对误差为0.79%,产生误差的主要原因有两点:一是仿真模拟的玉米籽粒模型与真实籽粒形状存在差异,二是排种器虚拟样机模型为刚体,与台架试验的排种器存在差异。在作业速度8~11 m/h时,排种器的合格指数均能达到92%以上,重播指数均低于5%,漏播指数均低于3.5%,在作业速度12~16 m/h时,排种器的合格指数均能达到90%以上,重播指数均低于7%,漏播指数均低于4%,满足国家标准的播种要求,因此本排种器对作业速度有较强的适应性。
4.3 排种器性能对比试验
基于上述仿真试验与台架试验的结果,双列限姿导引侧充式玉米高速精量排种器在W为4.65 mm、H为5.10 mm、α为81.86°的条件下,与勺轮式排种器分别开展作业速度为8、10、12、14、16 km/h的排种性能对比试验。在上文作业速度适应性台架试验方法的基础上,添加每组试验用种的破损率Y4统计结果,综合评价该排种器的高速作业性能。
由排种性能对比试验结果(表6)可知,相较传统的勺轮式排种器,当作业速度为8 km/h时,双列限姿导引侧充式排种器的作业效果与勺轮式排种器差异较小,排种合格指数提升2.10个百分点,种子破损率降低0.03个百分点,但随作业速度提升差异逐渐增大,在作业速度16 km/h下排种合格指数较勺轮式排种器提升11.66个百分点,种子破损率降低0.21个百分点,证明基于分级限姿导引侧充−径向突变辅助清种的双列限姿导引侧充式排种器可有效确保排种器高速作业时充、清种效果可靠,对比传统的勺轮式排种器对高速作业的适应性更强。
表 6 排种器性能对比试验结果Table 6. Results of comparative test on the performance of seed planter类型
Type作业速度/(km·h−1)
Working speed评价指标/%
Evaluation index合格指数
Qualified index重播指数
Replay index漏播指数
Leakage index破损率
Breakage rate双列限姿导引侧充式排种器
Double-row seed metering device with guided
side-filling and posture control8 92.44 4.37 3.19 0.13 10 92.53 4.65 2.82 0.19 12 91.45 5.05 3.50 0.25 14 91.04 5.52 3.44 0.29 16 90.57 6.01 3.42 0.36 勺轮式排种器
Spoon-wheel seed metering device8 90.34 6.65 3.01 0.16 10 88.12 7.05 4.83 0.25 12 84.53 8.67 6.80 0.33 14 81.58 10.33 8.09 0.41 16 78.91 11.06 10.03 0.57 5. 结论
1)本文针对现有的机械式玉米排种器高速作业性能较差的问题,设计了一种基于分级限姿导引侧充−径向突变辅助清种的双列限姿导引侧充式玉米高速精量排种器。通过理论分析和计算,结合种子形状特征尺寸与种子填充姿态对关键部件参数进行了设计。
2)基于EDEM和RecurDyn的耦合仿真的正交试验结果表明,排种器在型孔插件顶部宽度W为4.65 mm、护种盘后侧高度H为5.10 mm、护种盘底部角度α为81.86°的条件下,排种器的性能达到最优,排种器的合格指数、重播指数和漏播指数分别为92.18%、5.13% 和2.69%。
3)台架性能试验的结果表明,在作业速度12 km/h 时,排种合格指数为91.45%,与仿真试验的相对误差为0.79%,仿真优化试验结果可靠;在作业速度8~16 km/h时,排种器的合格指数均能达到90%以上,重播指数均低于7%,漏播指数均低于4%,满足玉米精量播种的技术要求;双列限姿导引侧充式排种器的高速作业性能优于传统的勺轮式排种器。证明采用限姿板分级限制引导种子姿态和径向突变结构辅助清种能有效提升其高速作业时的精量播种能力,使其具备良好的高速适应性及稳定性。
-
![]()
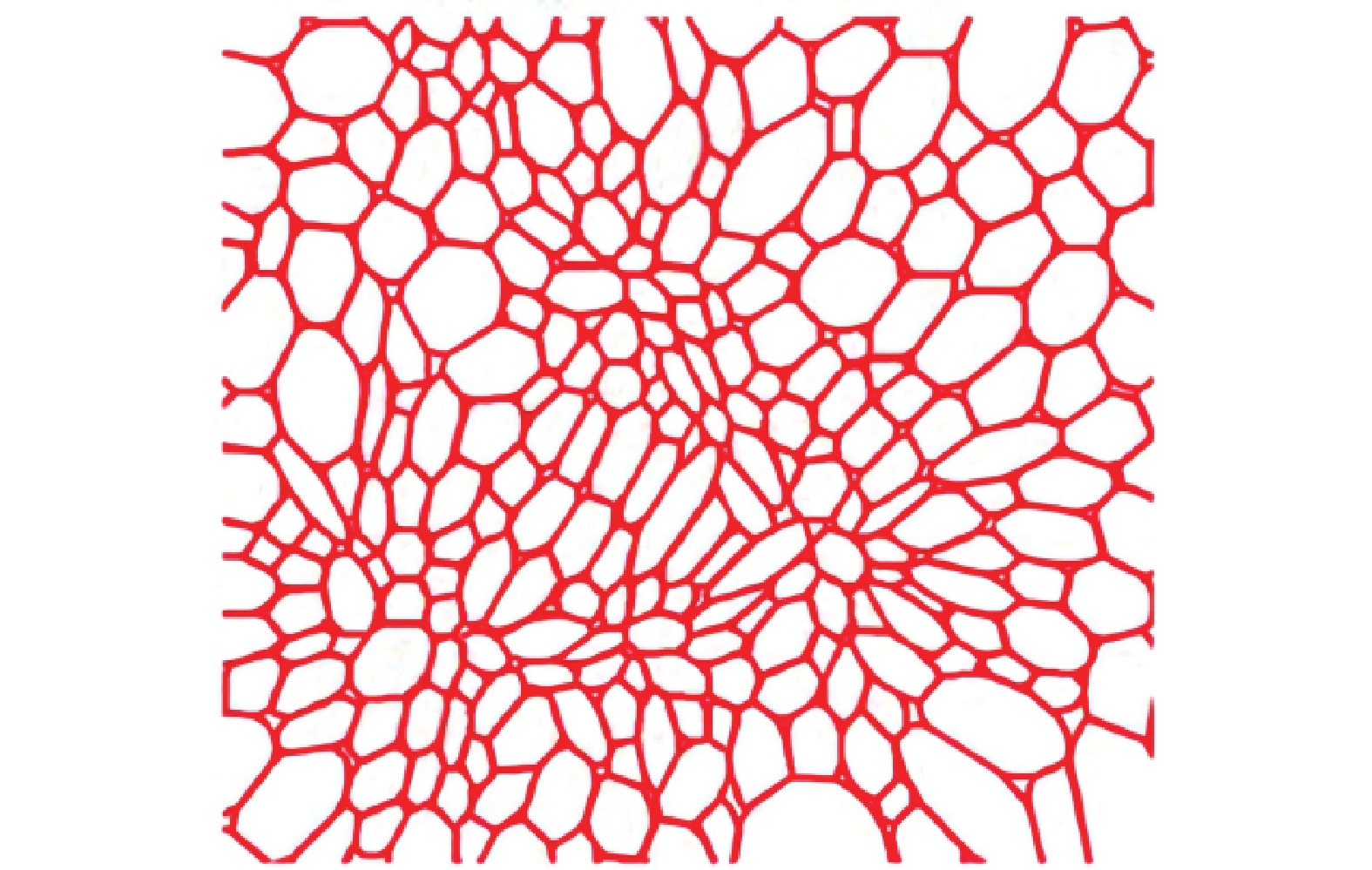
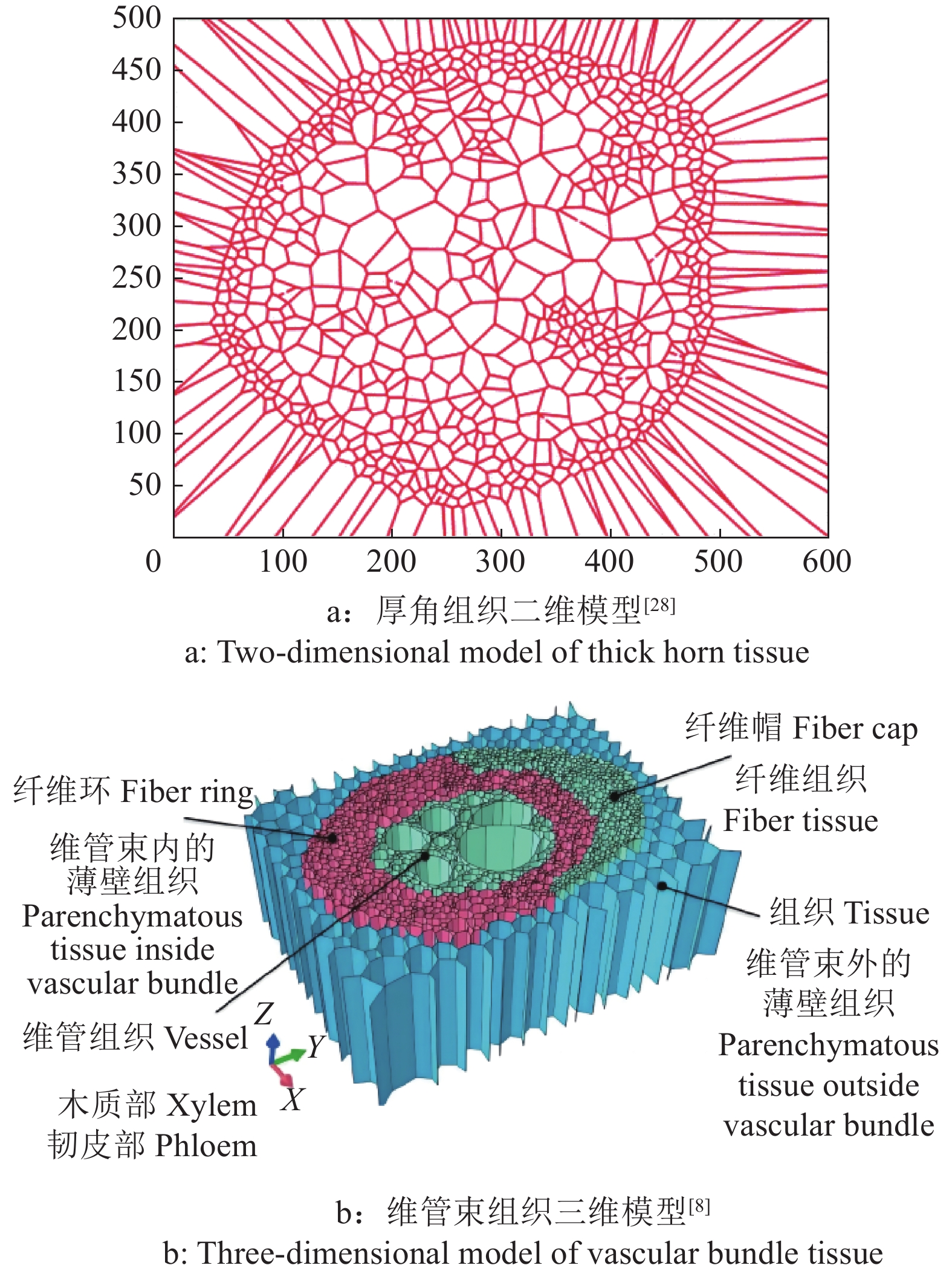
图 2 基于细胞骨架法构建的水稻茎秆维管束组织几何模型[31]
Figure 2. Geometric model of vascular bundle tissue of rice stem based on cytoskeleton method
![]()
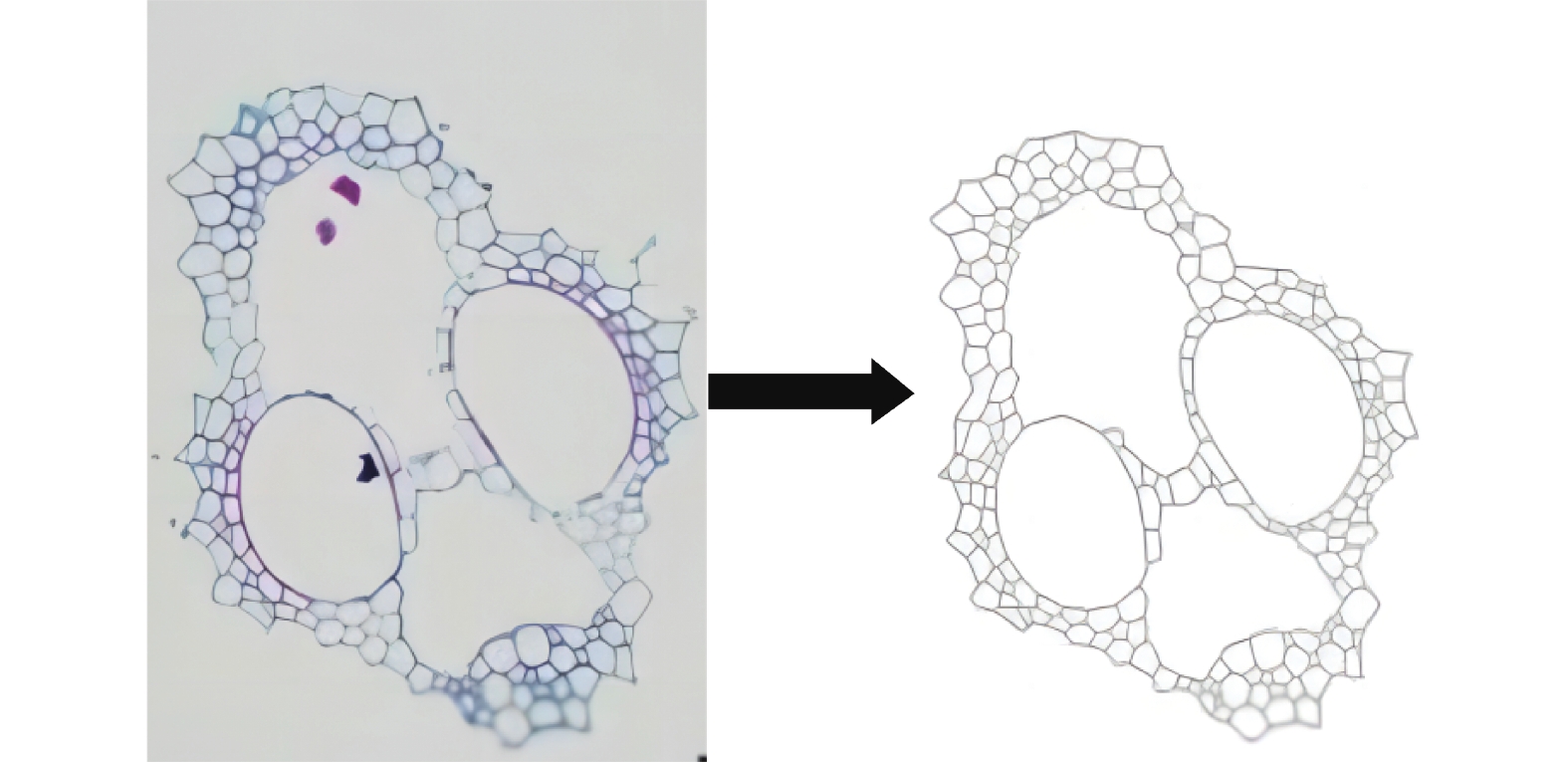
图 3 以椭圆拟合细胞构建的胡萝卜薄壁组织模型[33]
Figure 3. Carrot parenchyma model constructed by ellipse fitting cells
![]()
![]()
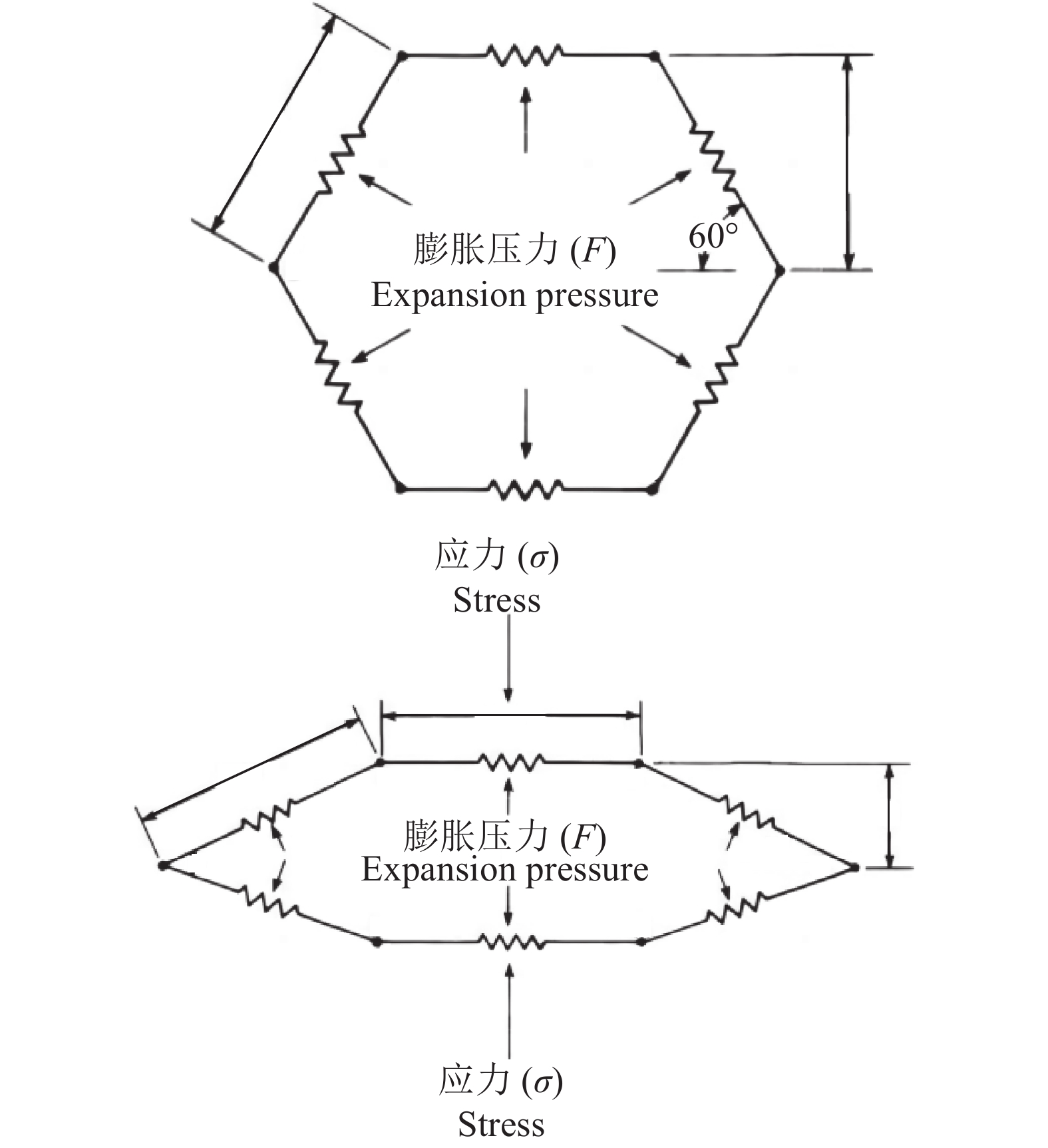
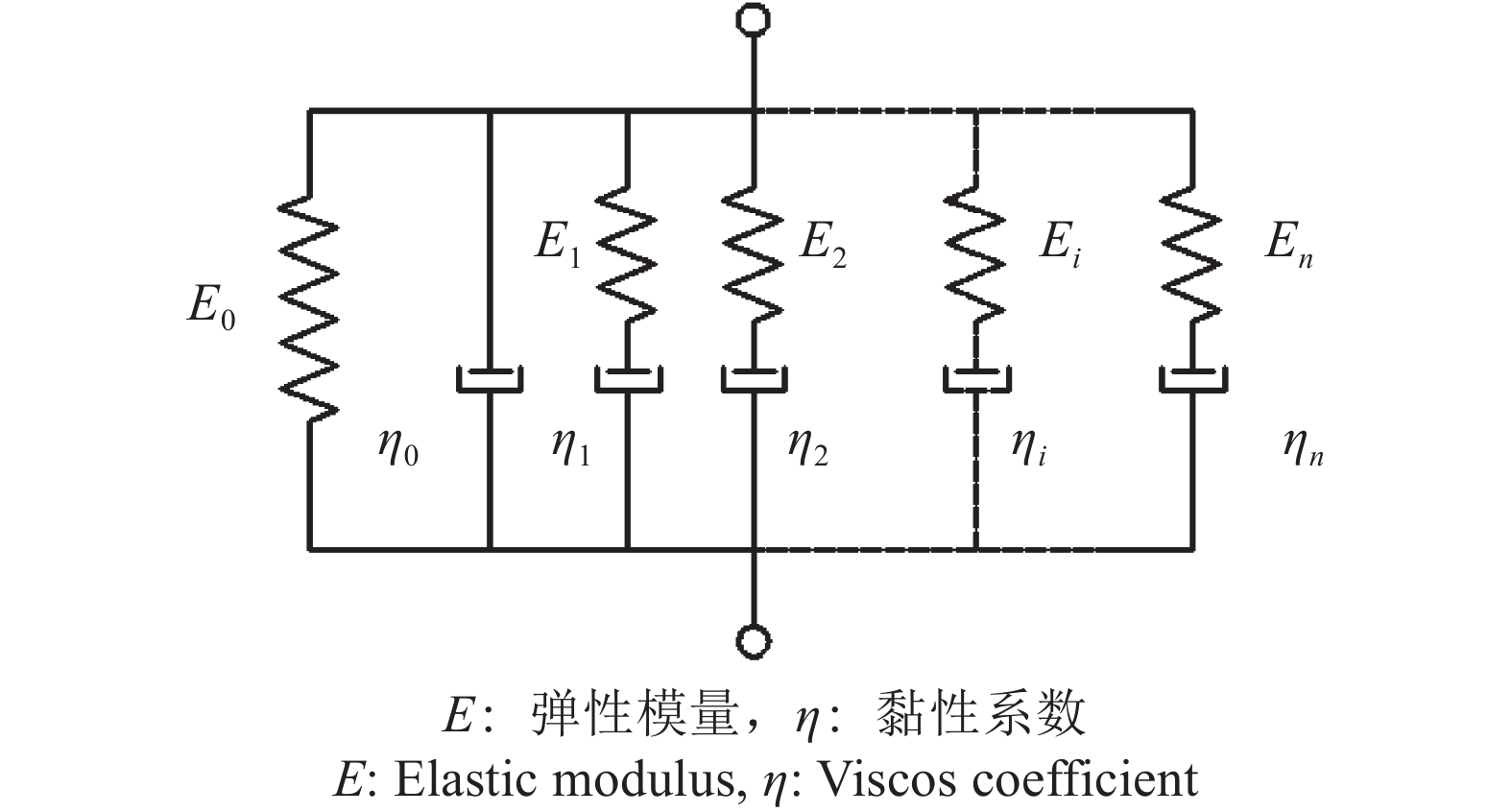
图 6 Gao等[53]建立的薄壁细胞理想模型
Figure 6. Ideal model of parenchyma cells established by Gao et al
-
[1] BAKER C J, STERLING M, BERRY P. A generalised model of crop lodging[J]. Journal of Theoretical Biology, 2014, 363: 1-12. doi: 10.1016/j.jtbi.2014.07.032
[2] 黄玲, 杨文平, 梅沛沛, 等. 砂质脱潮土区不同冬小麦品种(系)抗倒伏特性研究[J]. 灌溉排水学报, 2021, 40(3): 31-39. doi: 10.13522/j.cnki.ggps.2020420 [3] 尹伊君. 宽皮柑橘压缩损伤特性与机械损伤评估研究[D]. 武汉: 华中农业大学, 2018. [4] 周霞, 李东嵘, 蒋静, 等. 紫花苜蓿根系拉拔试验研究[J]. 人民长江, 2019, 50(7): 185-188. doi: 10.16232/j.cnki.1001-4179.2019.07.032 [5] 刘庆庭, 区颖刚, 卿上乐, 等. 光刃刀片切割甘蔗茎秆时根茬破坏力学分析[J]. 农业机械学报, 2007, 38(9): 51-54. doi: 10.3969/j.issn.1000-1298.2007.09.013 [6] LIU Q T, OU Y G, WANG W Z, et al. The mechanical properties and constitutive equations of sugarcane stalk[C]//ASABE Annual International Meeting. Minneapolis, Minnesota: American Society of Agricultural and Biological Engineers, 2007.
[7] VON FORELL G, ROBERTSON D, LEE S Y, et al. Preventing lodging in bioenergy crops: A biomechanic alanalysis of maize stalks suggests a new approach[J]. Journal of Experimental Botany, 2015, 66(14): 4367-4371. doi: 10.1093/jxb/erv108
[8] 汪宁陵. 王棕组织多尺度结构力学建模方法及仿王棕结构设计研究[D]. 广州: 华南理工大学, 2016. [9] 张凌. 一种植物组织二维重建算法及仿王棕叶柄的蜂窝梁设计[D]. 广州: 华南理工大学, 2019. [10] 张亮. 谷子茎秆与纤维拉伸力学特性测试研究[D]. 太谷: 山西农业大学, 2019. [11] 李红波, 薛晋霞, 王炳轩, 等. 谷子茎秆叶鞘叶片及其结合部位的拉伸力学性能[J]. 农业工程学报, 2020, 36(18): 11-17. doi: 10.11975/j.issn.1002-6819.2020.18.002 [12] 刘亮亮, 田杰, 杨皓翔, 等. 拟南芥花萼尖端褶皱现象的测量和分析[J]. 实验力学, 2020, 35(6): 970-977. doi: 10.7520/1001-4888-19-219 [13] BRUCE D M. Mathematical modelling of the cellular mechanics of plants[J]. Philosophical Transactions of the Royal Society of London Series B: Biological Sciences, 2003, 358(1437): 1437-1444.
[14] ASTLEY R, HARRINGTON J, STOL K. Mechanical modelling of wood microstructure, an engineering approach[J]. Ipenz Transactions, 1997, 24(1): 21-29.
[15] RÜGGEBERG M, SPECK T, PARIS O, et al. Stiffness gradients in vascular bundles of the palm Washingtonia robusta[J]. Proceedings Biological Sciences, 2008, 275(1648): 2221-2229.
[16] WATANABE U. Shrinking and elastic properties of coniferous wood in relation to cellular structure[D]. Kyoto: Kyoto University, 1998.
[17] PITT R E. Models for the rheology and statistical strength of uniformly stressed vegetative tissue[J]. Transactions of the ASAE, 1982, 25(6): 1776-1784. doi: 10.13031/2013.33805
[18] MILES J A, REHKUGLER G E. A failure criterion for apple flesh[J]. Transactions of the ASAE, 1973, 16(6): 1148-1153. doi: 10.13031/2013.37719
[19] GIBSON L J. The hierarchical structure and mechanics of plant materials[J]. Journal of the Royal Society, Interface, 2012, 9(76): 2749-2766. doi: 10.1098/rsif.2012.0341
[20] GHOSH S, LEE K, MOORTHY S. Two scale analysis of heterogeneous elastic-plastic materials with asymptotic homogenization and Voronoi cell finite element model[J]. Computer Methods in Applied Mechanics and Engineering, 1996, 132(1/2): 63-116.
[21] SILVA M J, HAYES W C, GIBSON L J. The effects of non-periodic microstructure on the elastic properties of two-dimensional cellular solids[J]. International Journal of Mechanical Sciences, 1995, 37(11): 1161-1177. doi: 10.1016/0020-7403(94)00018-F
[22] GOLOVIN Y I, GUSEV A A, MATVEEV S M. From nano-to macromechanical properties of wood via the hierarchy of its structural units and size effects (A Review)[J]. Bulletin of the Russian Academy of Sciences: Physics, 2022, 86(10): 1207-1218.
[23] LIVANI M A, SUIKER A S J, CRIVELLARO A, et al. A 3D multi-scale hygro-mechanical model of oak wood[J]. Wood Science and Technology, 2023, 57(6): 1215-1256.
[24] VORONOI G. Nouvelles applications des paramètrescontinus à la théorie deforme squad ratiques[J]. Journal Für Die Reine Und Angewandte Mathematik(Cell Journal), 1908, 1908(134): 198-287.
[25] ROUDOT A, DUPRAT F, PIETRI E. Simulation of a penetrometric test on apples using voronoi-delaunay tessellation[J]. Food Structure, 1990, 9(3): 215-222.
[26] FAISAL T R, HRISTOZOV N, WESTERN T L, et al. Computational study of the elastic properties of Rheum rhabarbarum tissues via surrogate models of tissue geometry[J]. Journal of Structural Biology, 2014, 185(3): 285-294. doi: 10.1016/j.jsb.2014.01.012
[27] ILINCANU L A, OLIVEIRA F A R. Strategy for controlling thermal processes in case of random fluctuations of the heating-medium temperature[J]. Process Optimisation and Minimal Processing of Foods, 1996, 3: 106-110.
[28] FAISAL T R, HRISTOZOV N, REY A D, et al. Experimental determination of Philodendron melinonii and Arabidopsis thaliana tissue microstructure and geometric modeling via finite-edge centroidal Voronoi tessellation[J]. Physical Review E, 2012, 86(3): 031921. doi: 10.1103/physreve.86.031921.
[29] LIU W Y, ZHANG L, HUANG J L, et al. Reconstruction of plant microstructure using distance weighted tessellation algorithm optimized by virtual segmentation[J]. Journal of Structural Biology, 2019, 208(2): 115-126. doi: 10.1016/j.jsb.2019.08.008
[30] PIECZYWEK P M, ZDUNEK A, UMEDA M. Study on parameterisation of plant tissue microstructure by confocal microscopy for finite elements modelling[J]. Computers and Electronics in Agriculture, 2011, 78(1): 98-105. doi: 10.1016/j.compag.2011.06.006
[31] HUANG J L, LIU W Y, ZHOU F, et al. Mechanical properties of maize fibre bundles and their contribution to lodging resistance[J]. Biosystems Engineering, 2016, 151: 298-307. doi: 10.1016/j.biosystemseng.2016.09.016
[32] MEBATSION H K, VERBOVEN P, HO Q T, et al. Microscale modelling of fruit tissue using Voronoi tessellations[C]//13th World Congress of Food Science & Technology. Les Ulis, France: EDP Sciences, 2006: 673-685.
[33] MEBATSION H K, VERBOVEN P, VERLINDEN B E, et al. Modeling fruit microstructure using an ellipse tessellation algorithm[C]//13th World Congress of Food Science & Technology. Nantes, France: EDP Sciences, 2006: 673-685.
[34] KERTESZ Z I. The pectic substances[M]. New York: Interscience Publishers, 1951.
[35] 付志一, 焦群英. 植物细胞力学模型研究进展[J]. 力学进展, 2005, 35(3): 404-410. doi: 10.3321/j.issn:1000-0992.2005.03.010 [36] WU N Q, PITTS M J. Development and validation of a finite element model of an apple fruit cell[J]. Postharvest Biology and Technology, 1999, 16(1): 1-8. doi: 10.1016/S0925-5214(98)00095-7
[37] DINTWA E, VAN ZEEBROECK M, RAMON H, et al. Finite element analysis of the dynamic collision of apple fruit[J]. Postharvest Biology and Technology, 2008, 49(2): 260-276. doi: 10.1016/j.postharvbio.2008.01.012
[38] DINTWA E, JANCSÓK P, MEBATSION H K, et al. A finite element model for mechanical deformation of single tomato suspension cells[J]. Journal of Food Engineering, 2011, 103(3): 265-272. doi: 10.1016/j.jfoodeng.2010.10.023
[39] HO Q T, VERBOVEN P, VERLINDEN B E, et al. A model for gas transport in pear fruit at multiple scales[J]. Journal of Experimental Botany, 2010, 61(8): 2071-2081. doi: 10.1093/jxb/erq026
[40] HO Q T, VERBOVEN P, VERLINDEN B E, et al. A three-dimensional multiscale model for gas exchange in fruit[J]. Plant Physiology, 2011, 155(3): 1158-1168. doi: 10.1104/pp.110.169391
[41] PALOMBINI F L, KINDLEIN W, DE OLIVEIRA B F, et al. Bionics and design: 3D microstructural characterization and numerical analysis of bamboo based on X-ray microtomography[J]. Materials Characterization, 2016, 120: 357-368. doi: 10.1016/j.matchar.2016.09.022
[42] QING H, MISHNAEVSKY L. 3D multiscale micromechanical model of wood: From annual rings to microfibrils[J]. International Journal of Solids and Structures, 2010, 47(9): 1253-1267. doi: 10.1016/j.ijsolstr.2010.01.014
[43] RATHNAYAKA MUDIYANSELAGE C M R, KARUNASENA H C P, GU Y T, et al. Novel trends in numerical modelling of plant food tissues and their morphological changes during drying: A review[J]. Journal of Food Engineering, 2017, 194: 24-39. doi: 10.1016/j.jfoodeng.2016.09.002
[44] LOODTS J, TIJSKENS E, WEI C F, et al. Micromechanics: Simulating the elastic behavior of onion epidermis tissue[J]. Journal of Texture Studies, 2006, 37(1): 16-34. doi: 10.1111/j.1745-4603.2006.00036.x
[45] VAN LIEDEKERKE P, GHYSELS P, TIJSKENS E, et al. A particle-based model to simulate the micromechanics of single-plant parenchyma cells and aggregates[J]. Physical Biology, 2010, 7(2): 026006. doi: 10.1088/1478-3975/7/2/026006.
[46] VAN LIEDEKERKE P, TIJSKENS E, RAMON H, et al. Particle-based model to simulate the micromechanics of biological cells[J]. Physical Review E, 2010, 81(6): 061906. doi: 10.1103/physreve.81.061906.
[47] VAN LIEDEKERKE P, GHYSELS P, TIJSKENS E, et al. Mechanisms of soft cellular tissue bruising: A particle based simulation approach[J]. Soft Matter, 2011, 7(7): 3580-3591. doi: 10.1039/C0SM01261K.
[48] KARUNASENA H C P, BROWN R J, GU Y T, et al. Application of meshfree methods to numerically simulate microscale deformations of different plant food materials during drying[J]. Journal of Food Engineering, 2015, 146: 209-226. doi: 10.1016/j.jfoodeng.2014.09.011
[49] PITT R E, DAVIS D C. Finite element analysis of fluid-filled cell response to external loading[J]. Transactions of the ASAE, 1984, 27(6): 1976-1983. doi: 10.13031/2013.33081
[50] LIU S B, YANG H Q, BIAN Z T, et al. Regulation on mechanical properties of spherically cellular fruits under osmotic stress[J]. Journal of the Mechanics and Physics of Solids, 2019, 127: 182-190. doi: 10.1016/j.jmps.2019.03.007
[51] NILSSON S B, HERTZ C H, FALK S. On the relation between turgor pressure and tissue rigidity: II: Theoretical calculations on model systems[J]. Physiologia Plantarum, 1958, 11(4): 818-837. doi: 10.1111/j.1399-3054.1958.tb08275.x
[52] PITT R E, CHEN H L. Time-dependent aspects of the strength and rheology of vegetative tissue[J]. Transactions of the ASAE, 1983, 26(4): 1275-1280. doi: 10.13031/2013.34116
[53] GAO Q, PITT R E. A mechanics model of the compression of cells with finite initial contact area[J]. Biorheology, 1990, 27(2): 225-240. doi: 10.13031/2013.31651
[54] ZHU H X, MELROSE J R. A mechanics model for the compression of plant and vegetative tissues[J]. Journal of Theoretical Biology, 2003, 221(1): 89-101. doi: 10.1006/jtbi.2003.3173
[55] MURASE H, MERVA G E. Static elastic modulus of tomato epidermis as affected by water potential[J]. Transactions of the ASAE, 1977, 20(3): 594-597. doi: 10.13031/2013.35606
[56] MURASE H, MERVA G E, SEGERLIND L J. Variation of young’s modulus of potato as a function of water potential[J]. Transactions of the ASABE, 1980, 23(3): 794-796. doi: 10.13031/2013.34664
[57] MYHAN R, MARKOWSKI M, JACHIMCZYK E. A non-linear rheological model of plant tissues[J]. Biosystems Engineering, 2020, 190: 1-10. doi: 10.1016/j.biosystemseng.2019.11.018
[58] MYHAN R, MARKOWSKI M. The compression specificity of plant tissue[J]. Journal of Texture Studies, 2020, 51(4): 593-600. doi: 10.1111/jtxs.12512
[59] BÖL M, SEYDEWITZ R, LEICHSENRING K, et al. A phenomenological model for the inelastic stress-strain response of a potato tuber[J]. Journal of the Mechanics and Physics of Solids, 2020, 137: 103870. doi: 10.1016/j.jmps.2020.103870.
[60] SONG R Y, MULIANA A. Modeling mechanical behaviors of plant stems undergoing microstructural changes[J]. Mechanics of Materials, 2019, 139: 103175. doi: 10.1016/j.mechmat.2019.103175.
[61] DAVIES G C, BRUCE D M. A stress analysis model for composite coaxial cylinders[J]. Journal of Materials Science, 1997, 32(20): 5425-5437. doi: 10.1023/A:1018691500653
[62] YAMAMOTO H, KOJIMA Y. Properties of cell wall constituents in relation to longitudinal elasticity of wood[J]. Wood Science and Technology, 2002, 36(1): 55-74. doi: 10.1007/s00226-001-0128-y
[63] ONGARO F, BARBIERI E, PUGNO N M. Mechanics of mutable hierarchical composite cellular materials[J]. Mechanics of Materials, 2018, 124: 80-99. doi: 10.1016/j.mechmat.2018.05.006
[64] GHYSELS P, SAMAEY G, TIJSKENS B, et al. Multi-scale simulation of plant tissue deformation using a model for individual cell mechanics[J]. Physical Biology, 2009, 6(1): 016009. doi: 10.1088/1478-3975/6/1/016009.
[65] WANG N L, LIU W Y, HUANG J L, et al. The structure-mechanical relationship of palm vascular tissue[J]. Journal of the Mechanical Behavior of Biomedical Materials, 2014, 36: 1-11. doi: 10.1016/j.jmbbm.2014.04.001
[66] AREGAWI W A, ABERA M K, FANTA S W, et al. Prediction of water loss and viscoelastic deformation of apple tissue using a multiscale model[J]. Journal of Physics: Condensed Matter, 2014, 26(46): 464111. doi: 10.1088/0953-8984/26/46/464111.
[67] 刘穆. 种子植物形态解剖学导论[M]. 4版. 北京: 科学出版社, 2008. [68] 李素坤, 张秋芝, 郝玉兰, 等. 玉米成熟期茎秆石蜡切片方法的研究[J]. 安徽农业科学, 2010, 38(8): 3935-3937. doi: 10.3969/j.issn.0517-6611.2010.08.031 [69] 梁艳, 刘德强, 潘朋, 等. 带有愈伤组织的红松种子石蜡切片制作方法改良[J]. 分子植物育种, 2022, 20(13): 4455-4461. doi: 10.13271/j.mpb.020.004455 [70] 陆叶, 席梦利, 郑佳, 等. 杨树和杉木茎段组织的冰冻切片技术研究[J]. 南京林业大学学报(自然科学版), 2009, 33(6): 44-48. [71] 宁代锋, 尹增芳, 张菁, 等. 一种简单快速植物组织冰冻切片方法[J]. 热带亚热带植物学报, 2008, 1(4): 386-389. doi: 10.3969/j.issn.1005-3395.2008.04.018 [72] 李建霞, 张出兰, 夏晓飞, 等. 植物冰冻切片条件的优化及其与石蜡切片在组织化学应用中的比较[J]. 植物学报, 2013, 48(6): 643-650. [73] 金嘉陵. 扫描电镜分析的基本原理[J]. 上海钢研, 1978(1): 29-45. [74] 陆彦, 祁琰, 张晓敏, 等. 高水分、富含淀粉植物组织的扫描电镜制备技术优化[J]. 植物科学学报, 2018, 36(1): 119-126. doi: 10.11913/PSJ.2095-0837.2018.10119 [75] 李艳聪, 杜晓勇, 王金海, 等. 苹果损伤力学特性[J]. 农业工程, 2018, 8(6): 77-80. doi: 10.3969/j.issn.2095-1795.2018.06.021

 下载:
下载:
























































计量
- 文章访问数: 223
- HTML全文浏览量: 44
- PDF下载量: 54
