Point cloud registration method of rape branches based on ISS-LCG combined feature points
-
摘要:目的
针对传统点云配准方法准确率低、速度慢等问题,以油菜Brassica napus L.分枝点云为研究对象,提出基于ISS-LCG组合特征点的配准方法。
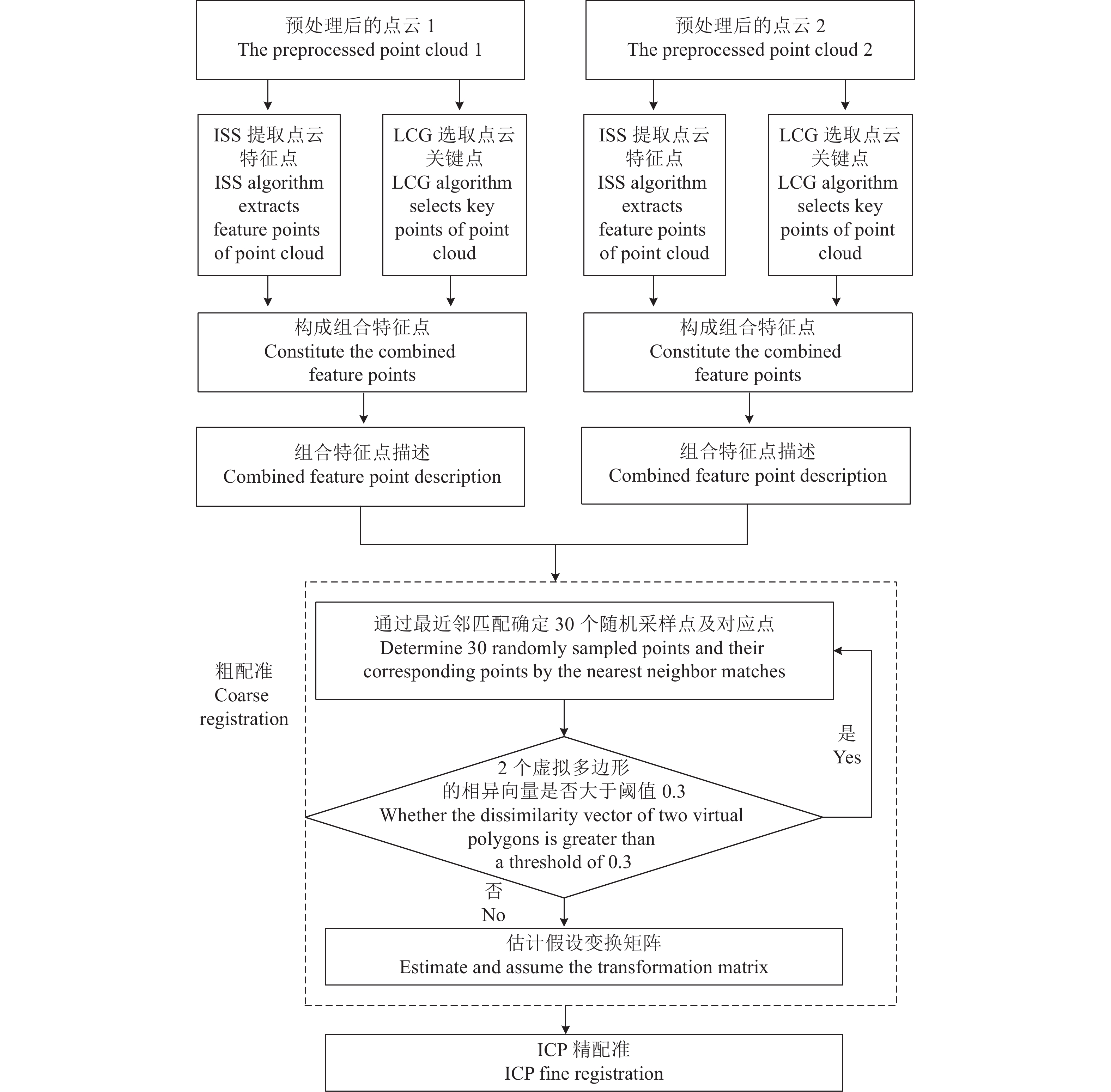
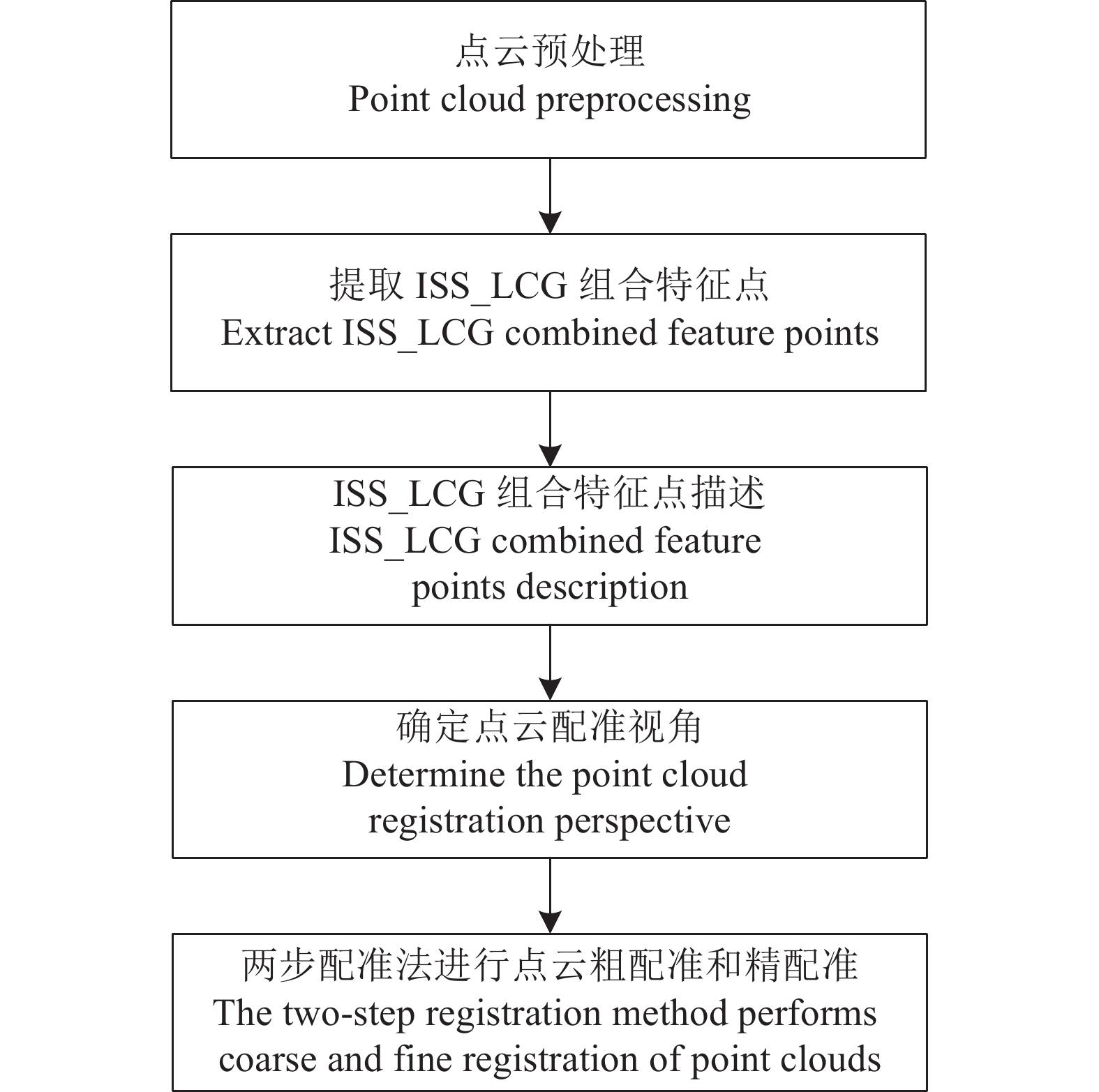
方法以成熟期油菜角果分枝点云为对象,去除背景噪声后,得到清晰完整的油菜分枝点云;然后通过内部形状描述子(Intrinsic shape signature,ISS)提取油菜分枝点云的特征点,再使用线性同余法(Linear congruential generator,LCG)伪随机选取油菜点云的部分点构成关键点,将特征点和关键点进行融合,构成ISS-LCG组合特征点;通过三维形状上下文特征(3D shape context,3DSC)对组合特征点进行特征描述,最后采用RANSAC+ICP两步点云配准法进行点云配准。
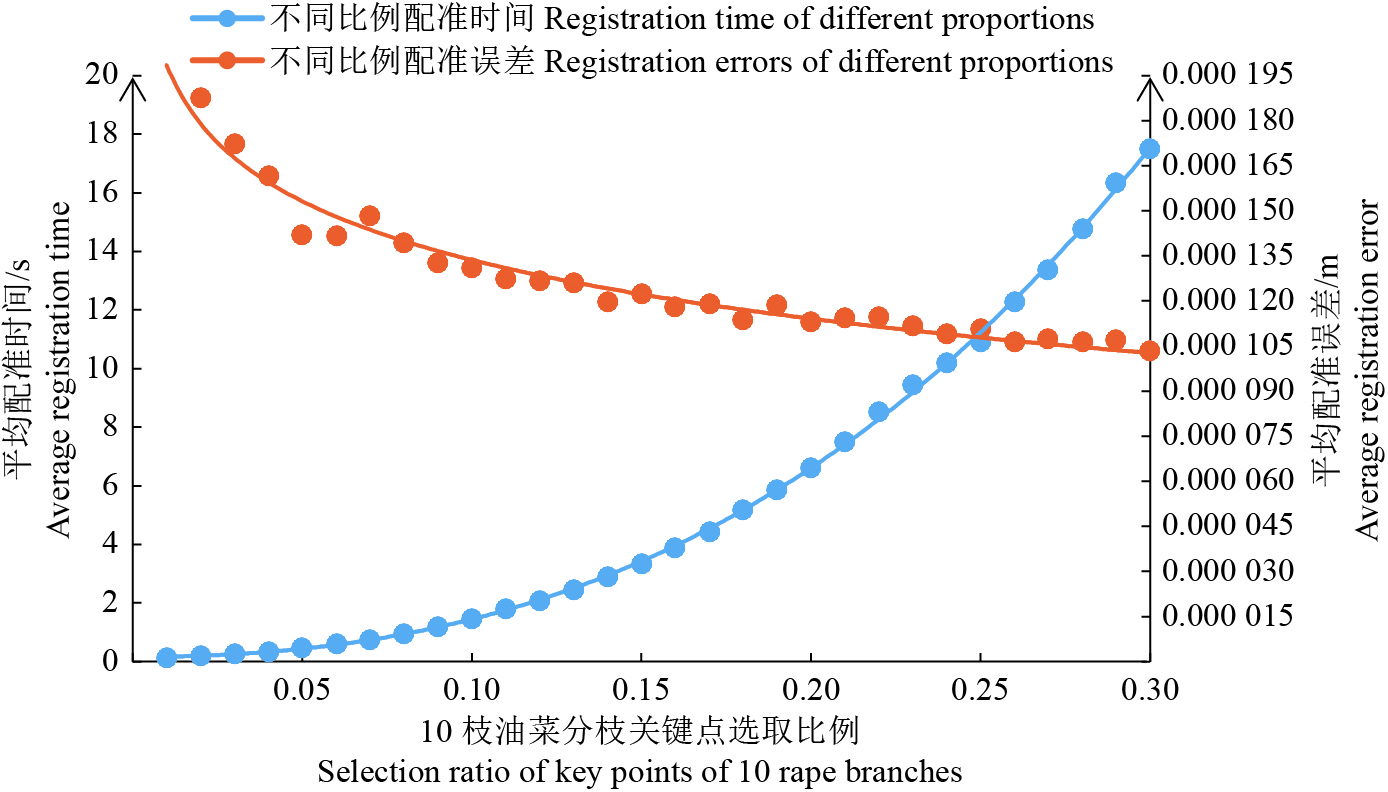
结果基于ISS-LCG组合特征点的点云配准算法以30°为间隔对点云进行两两配准时,配准效果最佳,配准误差约0.066 mm,配准精度比未采用组合特征点的配准方法提升了50%~70%;配准时间均小于48 s,平均配准时间为8.706 s。
结论该方法在可控环境内可以实现成熟期油菜植株高精度、高效率的自动配准。
-
关键词:
- 油菜 /
- 成熟期 /
- ISS-LCG组合特征点 /
- RANSAC算法 /
- 点云配准
Abstract:ObjectiveAiming at the problems of low accuracy and slow speed of traditional registration methods, we took point cloud of rape (Brassica napus L.) branches as the research object, and proposed a registration method based on ISS-LCG combined feature points.
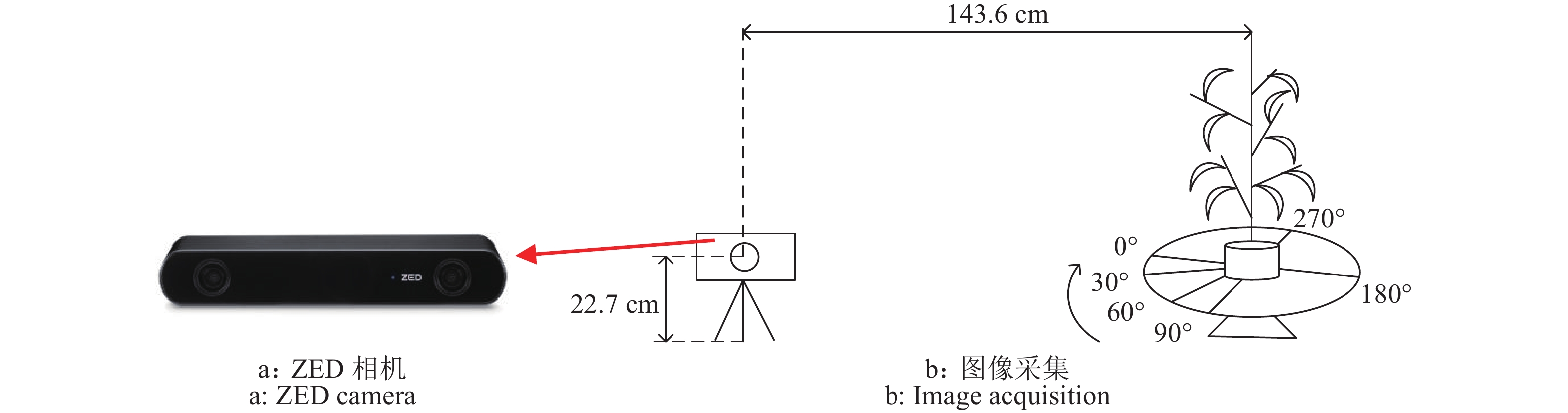
MethodThe pods of mature rape branches were taken as the research object. The background noise of rape point cloud was removed to obtain the clear and complete point cloud of rape branches. Intrinsic shape signatures (ISS) algorithm was used to extract feature points of point cloud. Linear congruential generator (LCG) algorithm was used to pseudo-randomly select some points of point cloud to constitute key points. Feature points and key points were combined to form ISS-LCG combined feature points. Then, the combined feature points were described by 3D shape context (3DSC) algorithm. Finally, RANSAC + ICP two-step point cloud registration method was used for point cloud registration.
ResultThe precision of on-time registration of rape branch point cloud in pairwise matching was the highest among shooting angles with an interval of 30°. The registration error was about 0.066 mm. Compared with the method without combined feature points, the registration accuracy was improved by 50%−70%. The registration time was less than 48 s, and the average registration time was 8.706 s.
ConclusionThe proposed method could achieve highly precise and efficient automatic registration of mature rape plants in a controlled environment.
-
-
![]()
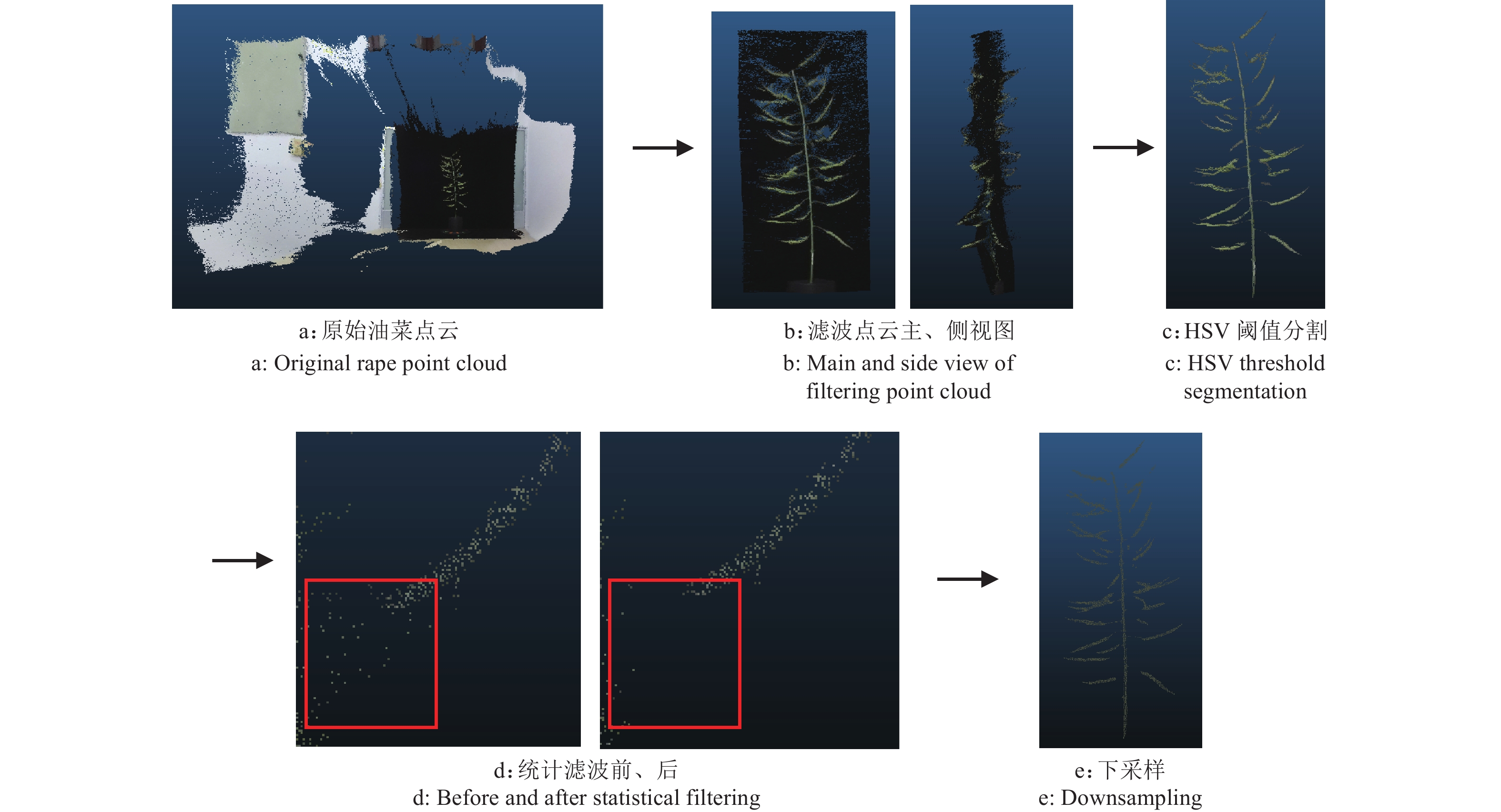
图 4 3号油菜分枝0°点云预处理流程
Figure 4. Pretreatment process of 0° point cloud for rape branch No.3
![]()
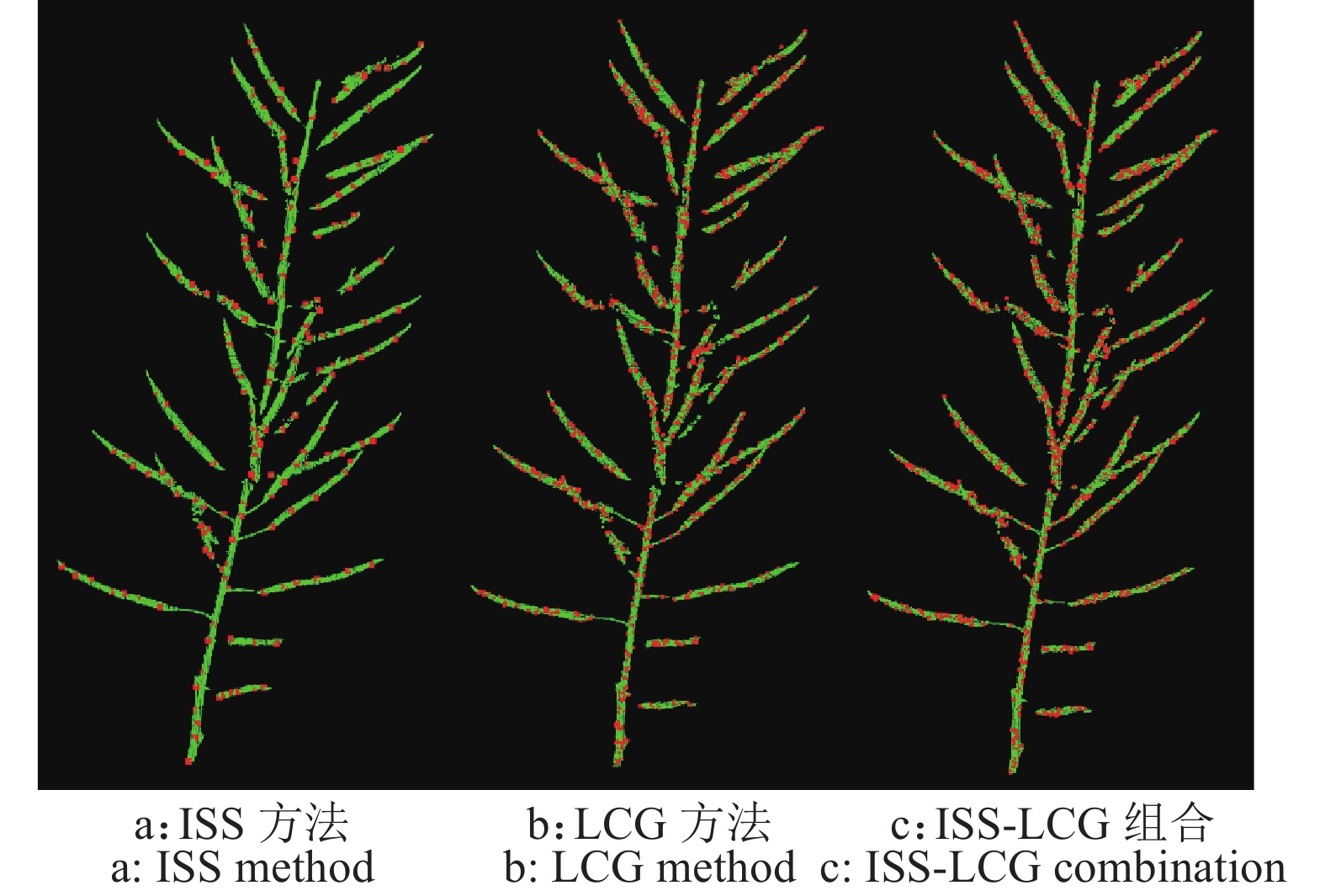
图 5 4号油菜分枝组合特征点提取
Figure 5. Extraction of combined feature points from No. 4 rape branch
![]()
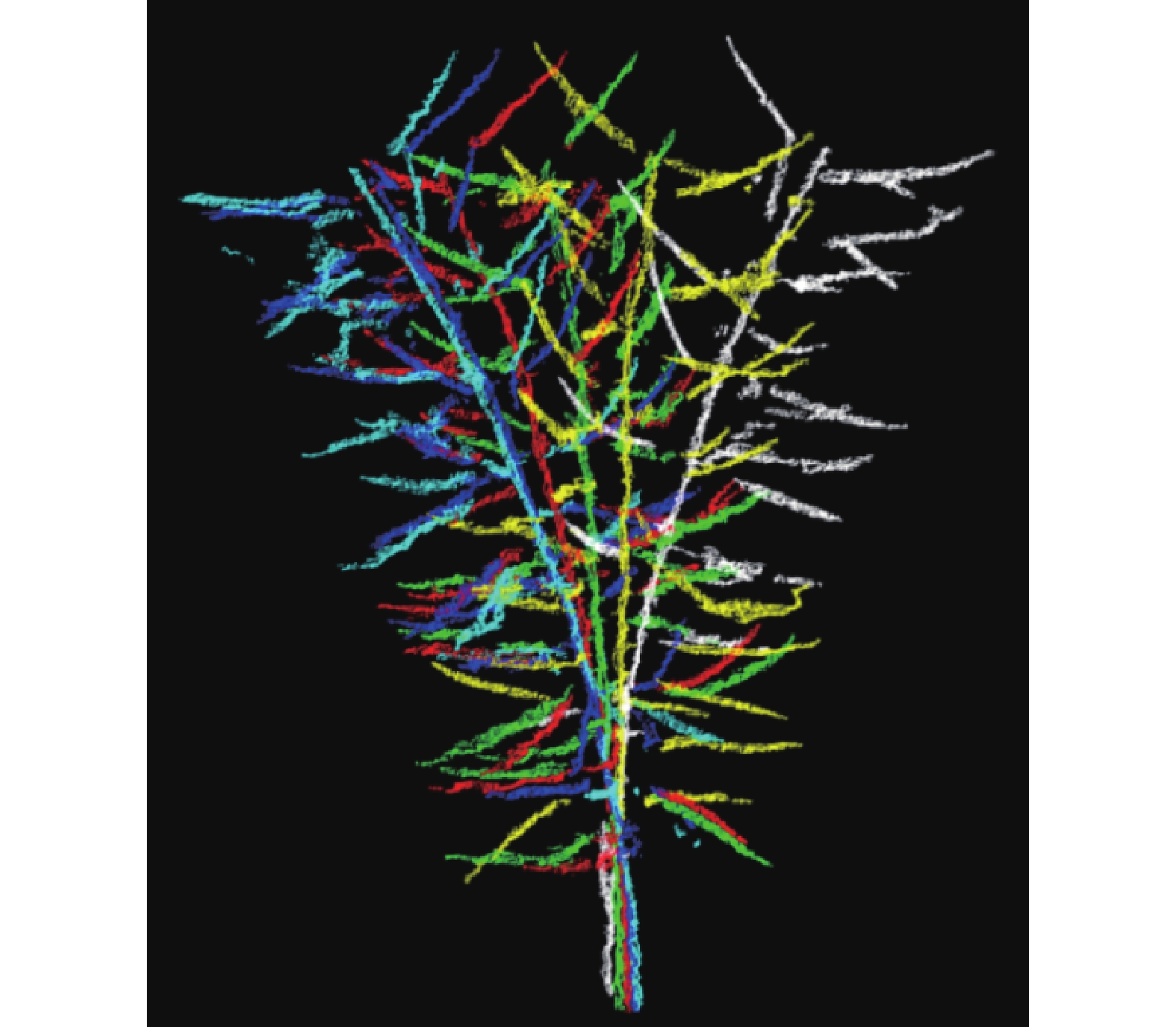
图 6 6个视角下的3号油菜分枝点云图
0°:绿色;30°:红色;60°:蓝色;90°:青色;180°:黄色;270°:白色
Figure 6. Point cloud images of rape branch No. 3 from six perspectives
0°: Green; 30°: Red ; 60°: Blue; 90°: Cyan; 180°: Yellow; 270°: White
![]()
图 7 基于组合特征点RANSAC+ICP点云配准流程图
Figure 7. RANSAC+ICP point cloud registration flow chart based on combined feature points
![]()
图 8 m∈(0, 0.30]时10枝油菜分枝平均配准误差和平均配准时间曲线
Figure 8. Mean registration error and mean registration time curve of 10 rape branches at m∈(0, 0.30]
![]()
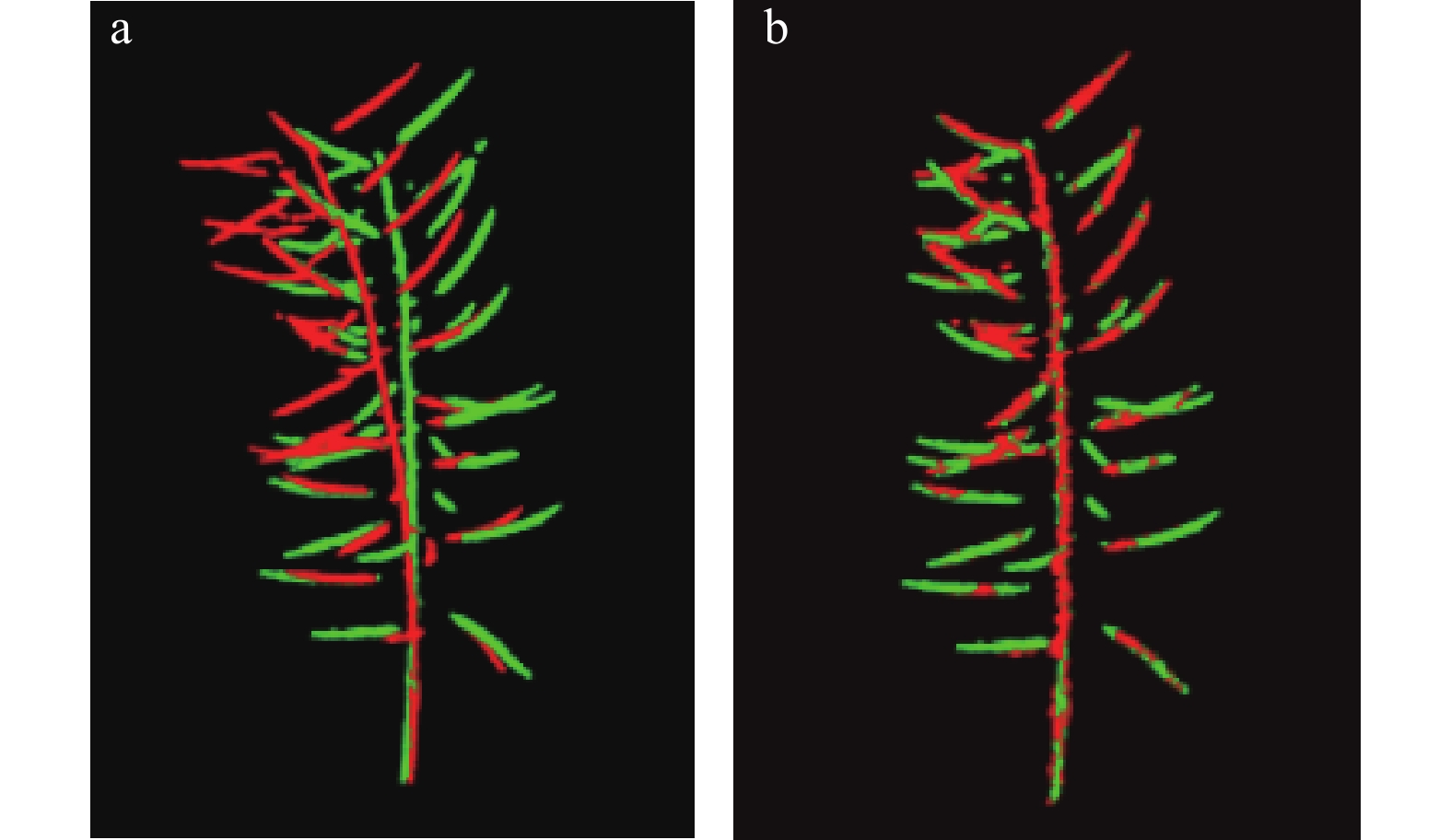
图 9 3号油菜分枝点云配准前(a)、后(b)效果
Figure 9. The effects of No. 3 rape branch before (a) and after (b) point cloud registration
-
[1] 李岚涛, 任涛, 汪善勤, 等. 基于角果期高光谱的冬油菜产量预测模型研究[J]. 农业机械学报, 2017, 48(3): 221-229. doi: 10.6041/j.issn.1000-1298.2017.03.028 [2] 陈松林. 长江流域冬油菜适宜密植关键株型指标及参数研究[D]. 武汉: 华中农业大学, 2020. [3] 汪文祥, 胡琼, 梅德圣, 等. 基于图像处理的油菜分枝及角果着生角度测量方法[J]. 中国油料作物学报, 2015, 37(4): 566-570. doi: 10.7505/j.issn.1007-9084.2015.04.020 [4] 沈跃, 潘成凯, 刘慧, 等. 基于改进SIFT-ICP算法的Kinect植株点云配准方法[J]. 农业机械学报, 2017, 48(12): 183-189. doi: 10.6041/j.issn.1000-1298.2017.12.021 [5] 马保建, 鄢金山, 王乐, 等. 基于骨架点的矮化密植枣树三维点云自动配准[J]. 农业机械学报, 2021, 52(9): 24-32. doi: 10.6041/j.issn.1000-1298.2021.09.003 [6] XU G, PANG Y, BAI Z, et al. A fast point clouds registration algorithm for laser scanners[J]. Applied Sciences, 2021, 11(8): 3426. doi: 10.3390/app11083426.
[7] 郑立华, 麦春艳, 廖崴, 等. 基于Kinect相机的苹果树三维点云配准[J]. 农业机械学报, 2016, 47(5): 9-14. doi: 10.6041/j.issn.1000-1298.2016.05.002 [8] 夏坎强. 基于ISS特征点和改进描述子的点云配准算法研究[J]. 软件工程, 2022, 25(1): 1-5. [9] 韩先锋. 三维点云去噪处理及特征描述的研究[D]. 天津: 天津大学, 2019. [10] 麦春艳, 郑立华, 李民赞. 基于点云配准的果树快速三维重建[J]. 农业工程学报, 2015, 31(S2): 137-144. doi: 10.11975/j.issn.1002-6819.2015.z2.021 [11] 徐胜勇, 卢昆, 潘礼礼, 等. 基于RGB-D相机的油菜分枝三维重构与角果识别定位[J]. 农业机械学报, 2019, 50(2): 21-27. doi: 10.6041/j.issn.1000-1298.2019.02.003 [12] 刘忠建. 基于OpenCL的ICP点云并行配准算法[J]. 计算机应用与软件, 2016, 33(11): 185-187. doi: 10.3969/j.issn.1000-386x.2016.11.043 [13] 林承达, 韩晶, 谢良毅, 等. 田间作物群体三维点云柱体空间分割方法[J]. 农业工程学报, 2021, 37(7): 175-182. doi: 10.11975/j.issn.1002-6819.2021.07.021 [14] 付昱兴, 李承明, 朱江, 等. Alpha-shape算法构建枣树点云三维模型[J]. 农业工程学报, 2020, 36(22): 214-221. doi: 10.11975/j.issn.1002-6819.2020.22.024 [15] 夏春华, 施滢, 尹文庆. 基于TOF深度传感的植物三维点云数据获取与去噪方法[J]. 农业工程学报, 2018, 34(6): 168-174. doi: 10.11975/j.issn.1002-6819.2018.06.021 [16] 杨栩, 朱大明, 杨润书, 等. 匹配点云结合HSI色彩分量的无人机RGB影像信息提取方法[J]. 农业工程学报, 2021, 37(22): 295-301. doi: 10.11975/j.issn.1002-6819.2021.22.034 [17] 孙智慧, 陆声链, 郭新宇, 等. 基于点云数据的植物叶片曲面重构方法[J]. 农业工程学报, 2012, 28(3): 184-190. doi: 10.3969/j.issn.1002-6819.2012.03.032 [18] RUSU R B, COUSINS S. 3D is here: Point cloud library (PCL)[C]// IEEE International Conference on Robotics & Automation. Shanghai, China: IEEE, 2011, 47(10): 1-4.
[19] 李修华, 魏鹏, 何嘉西, 等. 基于Kinect V3深度传感器的田间植株点云配准方法[J]. 农业工程学报, 2021, 37(21): 45-52. doi: 10.11975/j.issn.1002-6819.2021.21.006 [20] 许永超, 宋建国, 李哲, 等. 基于PCL的三维断点数据聚类方法[C]//第四届油气地球物理学术年会论文集, 青岛: 中国地球物理学会油气地球物理专业委员会, 2021: 155-158. [21] 尚业华, 张光强, 孟志军, 等. 基于欧氏聚类的三维激光点云田间障碍物检测方法[J]. 农业机械学报, 2022, 53(1): 23-32. doi: 10.6041/j.issn.1000-1298.2022.01.003 [22] BUCH A G, KRAFT D, KÄMÄRÄINEN J K, et al. Pose estimation using local structure-specific shape and appearance context[C]// International Conference on Robotics and Automation (ICRA). Karlsruhe, Germany: IEEE, 2013: 2080-2087.
[23] 荆路, 武斌, 方锡禄. 基于SIFT特征点结合ICP的点云配准方法[J]. 激光与红外, 2021, 51(7): 944-950. doi: 10.3969/j.issn.1001-5078.2021.07.019
 下载:
下载: