Multi-sensor data fusion and navigation line extraction method based on discrete factor
-
摘要:目的
针对玉米田间路径边界模糊和形状不规则特点,普通的田间导航线提取算法在农业机器人实际应用中会出现偏差过大的问题,本文针对3~5叶期玉米田提出了基于离散因子的相机与三维激光雷达融合的导航线提取算法。
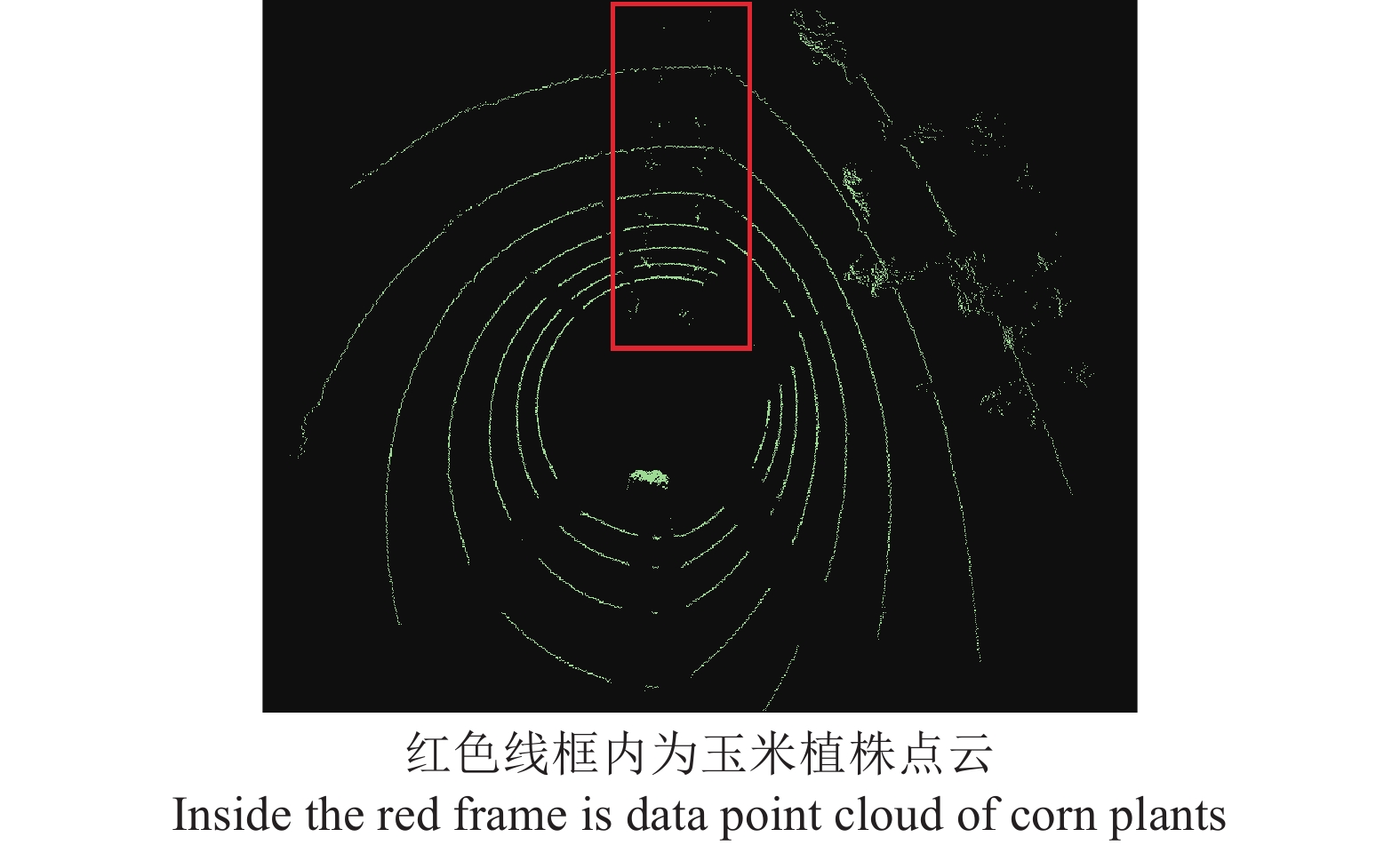
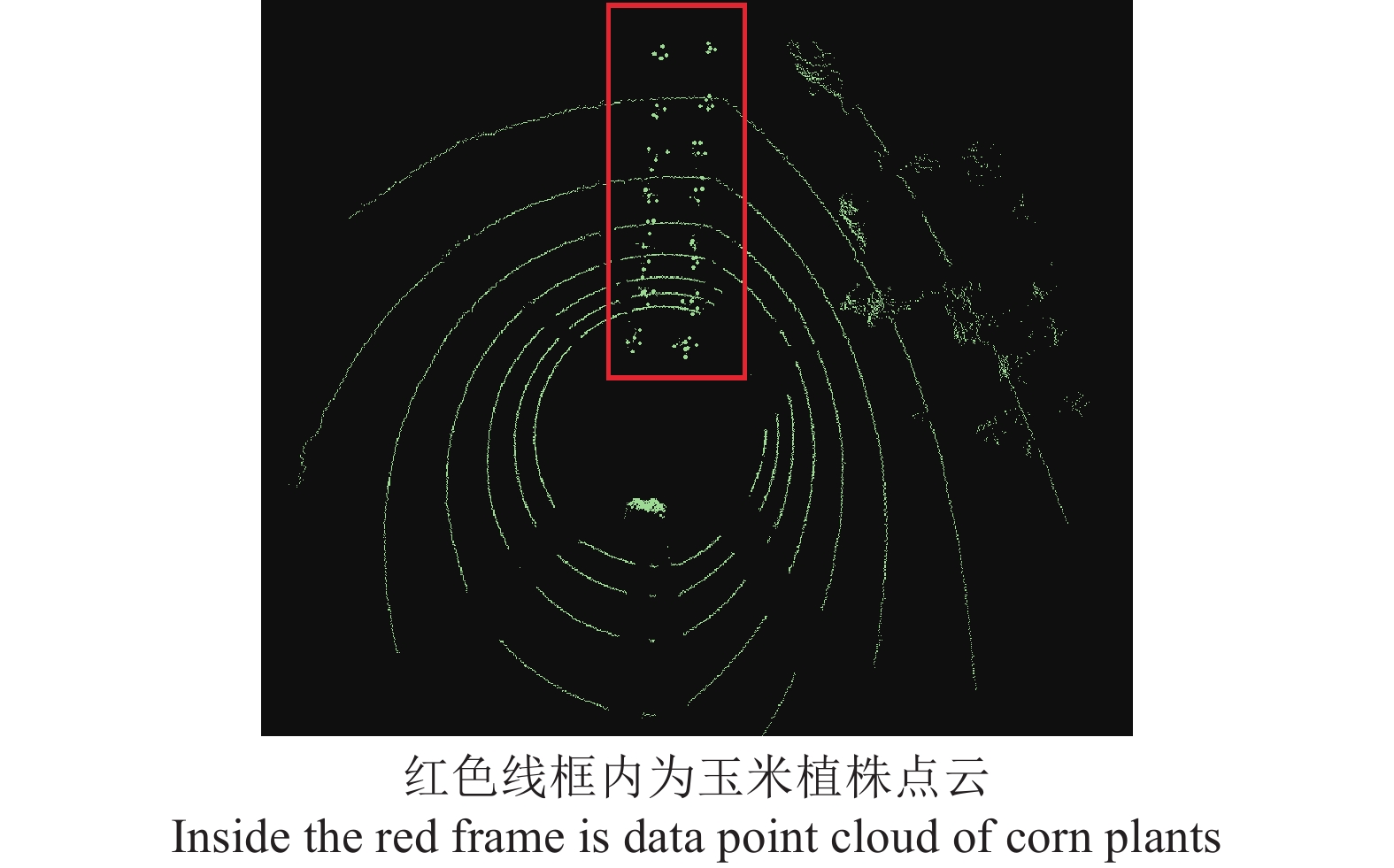
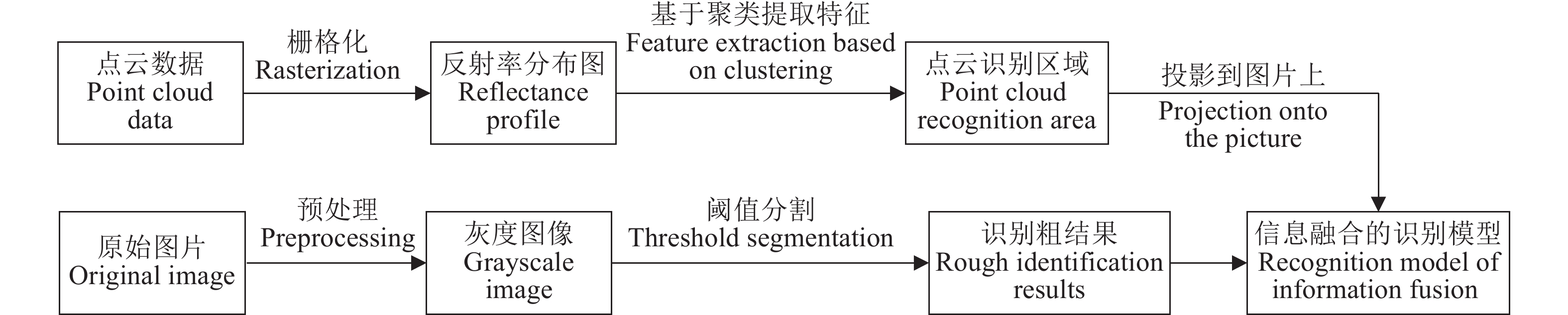
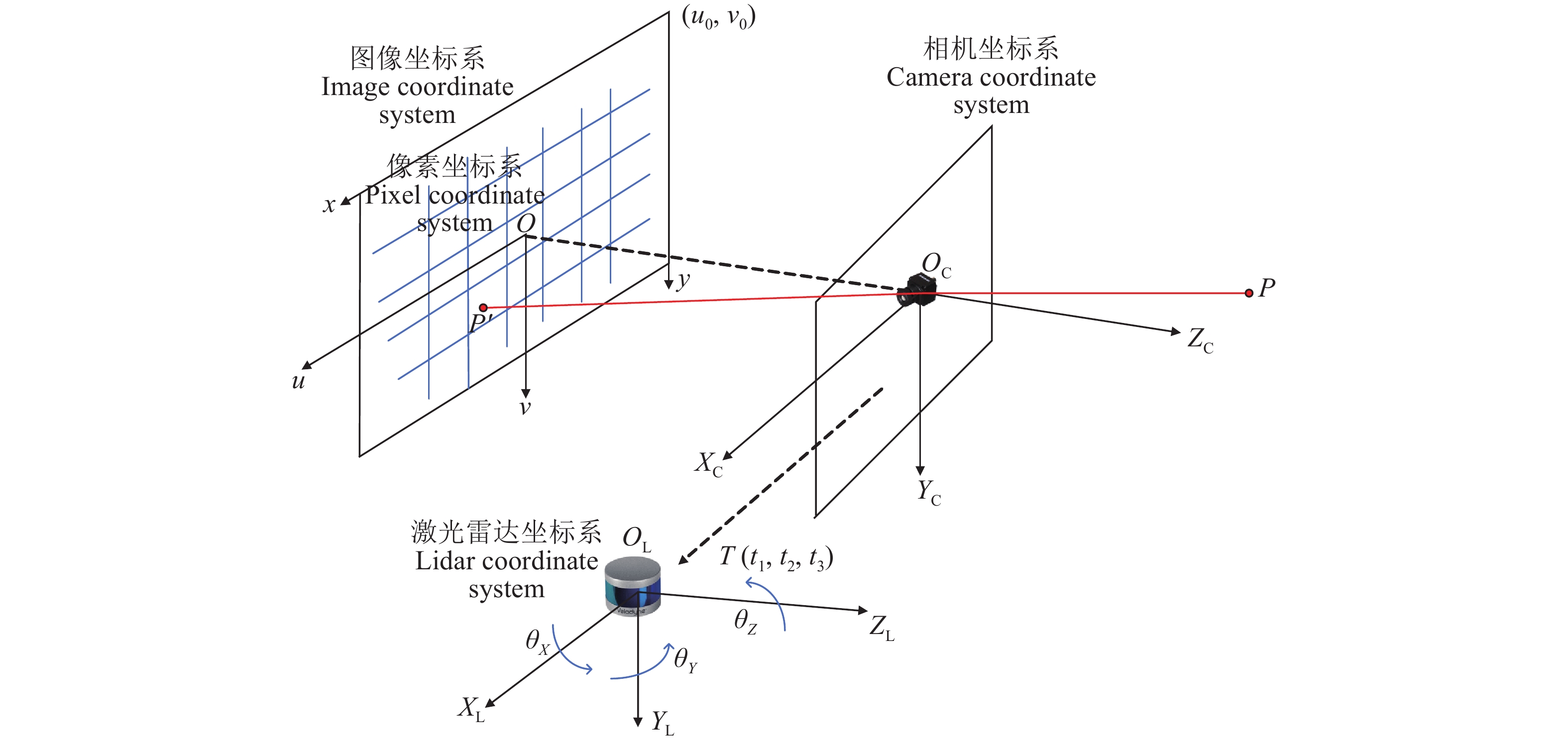
方法首先利用三维激光雷达获取玉米植株点云数据,同时将相机采集的图像利用超绿化算法和最大类间方差法自动获得绿色特征二值图像,然后将聚类分析后的点云数据投影到图像中的目标边框上,构建多传感器数据融合支持度模型进行特征识别,最后拟合所获取特征中心点即为导航基准线。
结果该算法能够很好地适应复杂环境,具有很强的抗干扰能力,单帧平均处理时间仅为95.62 ms,正确率高达95.33%。
结论该算法解决了传统算法寻找特征质心偏移、识别结果不可靠等问题,为机器人在玉米田间行走提供了可靠的、实时的导航路径。
Abstract:ObjectiveIn view of the fuzzy and irregular shape of the path boundary in the corn field, the common field navigation line extraction algorithm will have the problem of excessive deviation in practical application of agricultural robot. In this paper, a navigation line extraction algorithm based on discrete factor fusion of camera and 3D LiDAR is proposed for the field of corn at 3rd−5th leaf stage.
MethodFirst, three-dimensional lidar was used to obtain corn plant point cloud data. At the same time, the green feature binary images were obtained from the images taken by the camera using the super-green algorithm and the maximum between-cluster variance method, and then the point cloud data after cluster analysis were projected onto the target bounding box in the image. A multi-sensor data fusion support model was constructed for feature recognition. Finally the acquired feature center point was fitted as the navigation baseline.
ResultThe algorithm could adapt well to complex environments and had strong anti-interference ability. The average processing time of a single frame was only 95.62 ms, and the accuracy rate was as high as 95.33%.
ConclusionThe algorithm solves the problems of shifting in finding feature centroid and unreliable recognition results in traditional algorithms, and provides a reliable and real-time navigation path for the robot to walk in corn field.
-
Keywords:
- Multi-sensor /
- Discrete factor /
- Agricultural robot /
- Navigation /
- Laser point cloud /
- Data fusion
-
珠江是中国境内第3长河流,全长2 400 km,为中国第2大年流量的河流,为西江、北江、东江和珠江三角洲诸河的总称。其干流西江发源于云南省东北部马雄山,流经云南、贵州、广西、广东4省(区)及香港、澳门特别行政区,北江和东江水系几乎全部在广东境内。珠江流域在中国境内面积44.21万km2,另有1.1万余km2在越南境内。颜素珠等[1-2]于20世纪80年代末就开展了广东省珠江流域水生植物资源调查,共调查到水生维管植物131种,隶属44科81属,其中沉水植物33种,挺水植物70种,浮水植物28种。据国家林业局统计,我国沉水植物约有49种2变种,隶属11科15属[3]。北江地处珠江上游地区,为珠江三大水系之一,流域面积广阔,但有关水生植物资源的研究报道很少。本项目组(藉欧盟国际合作项目“河流上游水域资源的保护与可持续利用”)在广东省韶关市北江流域主要河段开展了沉水植物群落物种多样性及保护现状调查研究。本研究结果可为广东省韶关市及其邻近地区沉水植物资源的保护提供参考。
1. 研究地概况
北江为珠江水系支流,发源于江西省信丰县石碣大茅山,流入广东省南雄县境内称浈江(又名浈水),至韶关武江汇合后始称北江,此以下为中游,流至清远白庙后为下游,在佛山三水思贤窖与西江汇合注入珠江三角洲河网区流入南海,主要支流有武江、连江、滃江、潖江、滨江、绥江等。北江干流长468 km,集水面积86 710 km2,广东省境内为42 879 km2,纵贯韶关、清远、佛山和广州,占粤境内珠江流域面积的38%。韶关市为广东省境内北江源头流域,面积18 463 km2,年平均气温19.20 ℃,极高温42 ℃,极低温-4 ℃,年平均降水量1 200~1 600 mm。
2. 研究方法
2.1 野外调查方法
在踏查的基础上,在广东省韶关市沉水植物群落较集中的地段设置样带进行物种调查。每隔2 m设置1个面积为1 m×1 m的小样方,记录样方中的沉水植物种类、高度、盖度和水深。5个点分别位于北江浈水水域仁化县周田(SG1)、曲江区北江水域曲江区大坑口(SG2)、浈江区武江水域犁市(SG3)、乳源县南水(SG4和SG5)。
2.2 重要值和物种多样性
重要值(Ⅳ)=相对高度+相对盖度+相对频度。其中:相对高度=(某一物种高度/全部物种高度)×100%,相对盖度=(某个物种的盖度/所有物种的总盖度)×100%,相对频度=(某一物种的频度/所有物种的频度之和)×100%。
物种多样性包括丰富度(S)、多样性指数(H)和均匀度指数(E)。其中:S=物种数, H=-∑PilnPi, E=H/lnS。重要值能较综合地衡量其多样性,选用Ⅳ进行Pi计算,即Pi=Ⅳi/Ⅳ。
2.3 水样采集与检测
用水流测速计(南京圣荣仪器设备有限公司)分别在有草区和无草区测量水流速,每隔30 s读数1次,连续测量3 min,同时取水样3份,水的透明度使用透明度仪测量。
水样检测方法[4]:水样的pH测试使用玻璃电极法;化学需氧量(CODCr)使用重铬酸钾法;NH4+-N使用纳氏试剂分光光度法;总氮(TN)使用过硫酸钾氧化-紫外分光光度法;总磷(TP)使用过硫酸钾氧化-钼锑抗分光光度法;铜(Cu)、锌(Zn)使用火焰原子吸收分光光度法;铅(Pb)、镉(Cd)、镍(Ni)使用石墨炉原子吸收分光光度法;六价铬(Cr)使用二苯碳酰二肼分光光度法。
2.4 数据分析
将调查样方与其沉水植物重要值建立数据库。应用SPSS 19.0软件中的系统聚类分析法(Hierarchical cluster)进行样点物种相似性的聚类分析,不同样点物种相似性的差异采用离差平方和法(Ward法)[5]进行计算。
3. 结果与分析
3.1 调查区的沉水植物种类、分布及重要值
北江流域的沉水植物群落呈零星分布,仅见于人为活动较少的河岸边或河中央小岛周围,在水面交通和挖沙较频繁的区域少见。分布区域的水深约0.1~1.3 m,但在水体透明度较高的水域,沉水植物可生长在水深2~3 m的区域。在韶关市属县市5个调查区域的水域中,共记录了12种沉水植物,隶属于6科7属,包括11种被子植物和1种轮藻科植物(表 1)。在5个调查样点中,以眼子菜科植物种类最丰富,水鳖科和茨藻科次之。其中,水鳖科黑藻Hydrilla verticillata的出现频率最高,穗状狐尾藻Myriophyllum spicatum和菹草Potamogeton crispus次之,密刺苦草Vallisneria denseserrulata普遍见于韶关各水域(表 1)。
表 1 调查样点的沉水植物种类及分布Table 1. The species and distribution of submerged plants at survey sites
物种丰富度和多样性以韶关市浈江区武江SG3、乳源县南水SG4和SG5群落最高,共9种;韶关仁化浈水SG1群落的种类最贫乏,为密刺苦草单优群落,仅偶见少量的菹草。其中,微齿眼子菜Potamogeton maackianus(黄川腾等,201108002,CANT),为广东省新记录。
重要值分析结果表明:北江流域沉水植物群落以竹叶眼子菜P.wrightii、黑藻和密刺苦草为优势,以竹叶眼子菜的重要值最大,黑藻和密刺苦草次之,金鱼藻Ceratophyllum demersum最小(表 2)。
表 2 调查样点沉水植物的重要值Table 2. Importance value of submerged plants at survey sites
3.2 调查区沉水植物的地理成分分析
在所记录的6个沉水植物科中,除水鳖科为泛热带分布外,其余的科均为世界分布型;在所记录的6个沉水植物属中,除黑藻属为旧世界分布和苦草属为泛热带分布外,其余的金鱼藻属和大茨藻属2属均为世界分布。
从种的全球分布来看,竹叶眼子菜、密刺苦草、微齿眼子菜、眼子菜Potamogeton distinctus和小茨藻Najas minor 5种为亚洲特有种,其余种类均为跨洲分布(表 3)。其中,金鱼藻和大茨藻均为世界分布,但在调查区极少见;小眼子菜P.pusillus的全球分布也很广泛,除澳洲以外的大洲均有分布,但在本调查区中的分布面积较小;菹草的全球分布也较广,见于非洲以外的各大洲,在北江流域有分布,但种群通常较小;除了微齿眼子菜外,亚洲分布的眼子菜、密刺苦草和竹叶眼子均较常见,为北江流域的优势种(表 3)。
表 3 北江流域沉水植物种的地理成分1)Table 3. The geographical composition of submerged plant species in Beijiang River valley
3.3 调查区沉水植物的物候特点
实地调查发现,北江流域的沉水植物均为1年生草本植物,冬季至早春为衰亡期,花期或果期在夏季至秋季,眼子菜科植物和穗状狐尾藻通常是花果同期,多集中在7—11月(表 4)。
表 4 沉水植物的物候观察1)Table 4. The phenological observation of submerged plants
3.4 调查区沉水植物的物种多样性比较
物种多样性分析结果(表 5)表明,北江流域调查样点的沉水植物,除仁化县浈水水域SG1仅1物种外,其余4水域物种丰富度为5~10,多样性指数为1.34~1.96,均匀度指数为0.69~0.87,以韶关南水水域SG4和SG5的沉水植物群落的物种最丰富,物种多样性也高,浈水水域的物种丰富度和多样性最低。
表 5 各样点的沉水植物丰富度及多样性Table 5. Species richness and diversity of the submerged plants at different survey sites
3.5 调查区各样点的沉水植物群落的物种相似性
聚类分析结果(图 1)也表明,除单优群落外,地理位置相近的植物群落的物种相似性较高,如乳源南水水域的2个样点(SG4和SG5)物种相似性较高,优先聚在一起;曲江区大坑口(SG2)与武江水域(SG3)的沉水植物群落相似性也较高,它们先聚在一起;浈江区水域(SG1)物种最贫乏,最后才与其他样点聚在一起。
![图 1 基于沉水植物重要值的群落相似性的聚类分析]() 图 1 基于沉水植物重要值的群落相似性的聚类分析Figure 1. Clustering analysis on the community similarities based on importance value of submerged plants
图 1 基于沉水植物重要值的群落相似性的聚类分析Figure 1. Clustering analysis on the community similarities based on importance value of submerged plants3.6 调查区沉水植物群落区的水流及水质特性
5个调查区的水草区和非水草区的水质特性调查结果(表 6~表 8)表明,除了SG4水域为人工硬质护岸,水流较快外,其余水域均为自然的土质护岩,水草生境的水流较慢。水草通常生长在水位小于1.1 m、水流较缓、可透光的区域。除SG1外,冬季和夏季的水位稍有变化:SG4和SG5以夏季水位较高, SG2和SG5的水位冬季较高(表 6)。
表 6 不同季节水草群落水流速度、水位和透明度Table 6. Comparisons of water speed, height, and transparence of the survey sites in different seasons 表 7 调查群落水域的水质比较Table 7. Comparison of water quality of the survey sites
表 7 调查群落水域的水质比较Table 7. Comparison of water quality of the survey sites 表 8 调查群落水域的水质微量元素比较Table 8. Comparisons of water trace elements of the survey sites
表 8 调查群落水域的水质微量元素比较Table 8. Comparisons of water trace elements of the survey sites
不同水样的pH、总氮(TN)、总磷(TP)、铵氮(NH4+-N)含量和化学需氧量(CODCr)见表 7。不同调查点的水质有所不同,同一调查点夏季与冬季的水质也有不同程度的变化。各调查点水样呈中性,pH 6.93~7.61,以大坑口样点SG2的pH最低,南水水域的pH稍高,不同季节间的变化趋势不明显。变化较大的指标为TN、TP、NH4+-N含量和CODCr。整体来看,南水2个调查点SG4和SG5的水质最好,除总氮和铵氮外,其余指标均达到或接近国家Ⅰ级地表水的质量水平(国家地表水环境标准GB3828-2002);其余调查点水质的总氮和化学需氧量处于国家地表水Ⅱ~Ⅲ级之间。从同一水域不同季节的变化情况来看,TP、NH4+-N含量和CODCr以冬季较高,TN则以夏季稍高。
所有样本的重金属含量均达到国家Ⅰ级水的标准。在冬季,多数重金属元素含量高于夏季,但也有例外(表 8)。
4. 讨论
4.1 北江沉水植物的资源保护及其影响因素
在5个样点中,共记录了沉水植物12种,包括11种被子植物和1种轮藻。其中,微齿眼子菜为广东省首次记录。北江流域的沉水植物以世界广布型地理成分为主。其原因一方面是河流的水生环境比较稳定,缺少天然屏障,有利于沉水植物的扩散;另一方面也可能与人为干扰和环境退化导致沉水植物群落物种日益衰退甚至消失有关。
沉水植物完全依赖水生环境,对环境胁迫的反应最敏感[6]。城市化与工业化导致的河流水体受污染和采沙筑坝等人为活动是河流生物多样性发展的主要威胁[7-11]。而水体总磷、正磷酸盐、化学需氧量、透明度和水深等环境因子均与沉水植物群落分布密切相关[12-15]。许振成等[16]、吕文英等[17]检测分析了北江中上游底泥的重金属污染情况,揭示了本研究所涉及的几条北江支流(南水、武江、浈水和大坑口)底泥均存在不同程度的镉污染,以大坑口水域的潜在生态危害指数最高(1374.3),反映了其潜在生态危害已达到很强的程度;浈江水域的潜在生态危害指数次之(529.8),其潜在生态危害程度为强;南水和武江水域的潜在生态危害指数分别为293.5和290,潜在生态危害强度中等。杨晓云等[18]揭示了北江底栖动物也表现出与底泥相似的重金属污染。本研究结果揭示了曲江区北江水域的大坑口(SG2)和仁化浈水水域的周田(SG1)水域水质较差,总磷、总氮和CODCr均较高,重金属含量也明显高于南水区,反映了这些水域的水质受到一定的农业和工业污染,再加上周边洗矿的污染,导致其沉水植物物种丰富度和多样性较低。与大坑口、周田和犁市相比,南水(SG4和SG5)水域的水体很清澈,主要污染源来源于生活污水,除了总氮外,水质均达到Ⅰ级水的质量标准,其沉水植物丰富度和多样性较高,反映了水质较好的水域有利于沉水植物多样性的发展。武江犁市(SG3)沉水植物群落的干扰主要来自挖沙和大坝提升了水位(物理因素的干扰),其总磷低于大坑口和周田,其沉水植物群落的物种丰富度和多样性均居中等水平。由此可见,北江的水质污染、挖沙和大坝均影响着当地沉水植物多样性的发展,是造成北江上游水生生态资源退化的主要原因,而水质污染的影响更严重。
王书航等[19]研究了蠡湖水体氮、磷时空变化及差异性,发现蠡湖水体中氮、磷浓度不稳定,TN和TP含量呈现自东向西依次递减的趋势,在季节上,TN和TP含量呈现夏季、秋季较高,而冬季、春季低的特点。本研究结果显示, 总氮也具有夏季高于冬季的趋势,但TP、NH4+-N含量及CODCr、多数重金属含量则呈现冬季高于夏季的趋势。王书航等[19]认为蠡湖水体在秋冬季出现较高总磷浓度的原因与秋季藻类大量死亡有关。而本研究区水体中的藻类相对较少,影响水体总磷和总氮的因素主要来自农业和生活污水,而冬季水流动缓慢,是导致冬季水中磷浓度高于夏季的主要原因。
4.2 北江流域的物种相似性及与邻近水域的比较
曾宪锋[20]在粤东地区记录了金鱼藻、穗状狐尾藻和菹草等6种沉水植物种类,它们在北江流域均有出现,相似度较高。与长江流域的武汉东湖[21]和广西钦州市[22]比较,北江流域沉水植物的种类也比较接近,即均由适应性较强、分布较广的物种组成。北江流域沉水植物群落均为泛化种的原因:一方面是由水域环境自然条件差异较小的特性所决定,另一方面也与长期的人为活动,对自然水域环境干扰频繁,导致一些特化或适应性窄的物种衰退或消失有关。
4.3 加强北江流域沉水植物保护的建议
水生植物(特别是沉水植物)依赖水环境,它们不仅可为鱼类等各种水生动物提供良好的栖息环境,而且还可为其提供食物,而鱼类等水生动物也可通过与沉水植物的相互作用调节沉水植物的种群结构。此外,水生植物对修复和改善水环境也有重要作用[23-24]。因此,保护沉水植物群落及其物种多样性对维持江河流域水生资源多样性及渔业资源的可持续发展具有重要的意义。为了促进北江渔业的可持续发展,韶关市每年举行“休渔放生节”。休渔、放生等活动对北江上游渔业资源的维持有一定的作用,但对水生植物群落的保护也应该受到重视。基于本研究结果,我们对于北江流域水生植物资源的保护提出以下几点建议:
1) 加强合理规划,减少对自然水域的人为干扰,为北江上游水生生物资源的可持续发展提供良好的生态环境。近年北江上游已建立了多个大型水电站,对当地自然资源利用和减灾防灾具有重要的战略意义,但过多的水电站大坝导致河流潮汐和水量的剧烈变化,会直接或间接地影响水生生物种群的自然繁衍。因此,水电站的建设必须综合考虑其对周边水生生物资源的影响,尽可能地避免或减缓水电站建设工程对当地水生资源的破坏。此外,北江上游的挖沙活动较频繁,挖沙不仅会影响河床的地质结构,而且对水生植物及其他底栖类动物也有严重的干扰,建议将一些水生生物资源较丰富的重要区域列为禁止挖沙区。根据韶关市“十二五”林业发展规划,韶关市将在2011—2015年期间拟新建“乐昌峡省级湿地公园”、“武江区龙湾省级湿地公园”等10个湿地公园,这些湿地公园的建立将有利于北江上游地区水生资源的有效保护和可持续利用。
2) 减少污染也是保护北江水生资源的迫切需要。北江上游有大宝山铁矿、韶关冶炼厂、韶关钢铁厂等多个大型企业和多个小型私有工矿企业。大多数大型国企在加强对污染物的处理,禁止工业废水、废渣往河道排放均已做了大量设备更新和改进,但一些小型私有企业还存在着违规排放污染物的现象,极需严格监管。
3) 水生生物的生态学研究和生态学观念的宣传教育对北江上游水生资源的保护与发展也具有重要的意义。目前,有关北江流域水生资源的研究不多,大众对北江水生植物和水生动物的认识也不多。因此,应加强对北江上游水生生态系统,特别是沉水植物及其他水生动物资源的生态学研究,为珠江上游水生资源的保护与利用提供科学依据。
-
表 1 玉米植株特征随机变量及其标准差和均值
Table 1 Random variables, standard deviations and means of maize plant characteristics
传感器编号
Sensor number目标1 Target 1 目标2 Target 2 目标3 Target 3 随机变量
Random variable标准差
Standard deviation均值
Mean标准差
Standard deviation均值
Mean标准差
Standard deviation均值
Mean1 50.0 246.0 68.0 372.0 23.0 289.0 318.0 2 1.1 1.8 0.6 2.6 0.7 2.9 3.4  下载: 导出CSV
下载: 导出CSV
表 2 各传感器对不同目标的隶属度
Table 2 Membership of each sensor to different targets
传感器编号
Sensor number目标1
Target 1目标2
Target 2目标3
Target 31 0.28 0.59 0.37 2 0.27 0.33 0.64
下载: 导出CSV
表 3 不同传感器性能评价指标
Table 3 Performance evaluation index of different sensors
传感器
Sensor平均处理时间/ms
Average processing time处理帧数
No. of processing frames正确帧数
No. of correct frames正确率/%
Correct rate平均误差角度/(°)
Mean error angle相机 Camera 49.76 300 272 90.67 3.457 三维激光雷达
3D LiDAR58.15 300 278 92.67 2.670 传感器融合
Sensor fusion95.62 300 286 95.33 1.595
下载: 导出CSV
-
[1] YANG K, ZHANG Z, CHENG H, et al. Domain centralization and cross-modal reinforcement learning for vision-based robotic manipulation[J]. International Journal of Precision Agricultural Aviation, 2018, 1(1): 48-55. doi: 10.33440/j.ijpaa.20200302.77
[2] 张琳洁, 张文爱, 韩应征, 等. 农业机械导航关键技术发展分析[J]. 农机化研究, 2016, 38(6): 10-15. doi: 10.3969/j.issn.1003-188X.2016.06.002 [3] SØGAARD H T, OLSEN H J. Determination of crop rows by image analysis without segmentation[J]. Computers and Electronics in Agriculture, 2003, 38(2): 141-158. doi: 10.1016/S0168-1699(02)00140-0
[4] 常昕, 陈晓冬, 张佳琛, 等. 基于激光雷达和相机信息融合的目标检测及跟踪[J]. 光电工程, 2019, 46(7): 91-101. [5] 胡丹丹, 殷欢. 基于机器视觉的玉米收获机器人路径识别[J]. 农机化研究, 2017, 39(12): 190-194. [6] MARCHANT J A, BRIVOT R. Real-time tracking of plant rows using a hough transform[J]. Real-Time Imaging, 1995, 1(5): 363-371. doi: 10.1006/rtim.1995.1036
[7] 梁习卉子, 陈兵旗, 姜秋慧, 等. 基于图像处理的玉米收割机导航路线检测方法[J]. 农业工程学报, 2016, 32(22): 43-49. doi: 10.11975/j.issn.1002-6819.2016.22.006 [8] 俞毓锋, 赵卉菁. 基于相机与摇摆激光雷达融合的非结构化环境定位[J]. 自动化学报, 2019, 45(9): 1791-1798. [9] 宋宇, 刘永博, 刘路, 等. 基于机器视觉的玉米根茎导航基准线提取方法[J]. 农业机械学报, 2017, 48(2): 38-44. doi: 10.6041/j.issn.1000-1298.2017.02.005 [10] 冯娟, 刘刚, 司永胜, 等. 果园视觉导航基准线生成算法[J]. 农业机械学报, 2012, 43(7): 185-189. doi: 10.6041/j.issn.1000-1298.2012.07.034 [11] WOEBBECKE D M. MEYER G E, BARGEN K V, et a1. Color indices for weed identification under various soil, residue, and lighting conditions[J]. Transactions of the ASAE, 1995, 38(1): 259-269. doi: 10.13031/2013.27838
[12] KASHYAP Y, KHARE A, LIPTON M. An improved SOBEL algorithm for palm image edge detection using OTSU method[J]. Biometrics and Bioinformatics, 2012, 4(7): 312-317.
[13] YANG H, ZHAO J, LAN Y, et al. Fraction vegetation cover extraction of winter wheat based on RGB image obtained by UAV[J]. International Journal of Precision Agricultural Aviation, 2018, 1(1): 54-61.
[14] 范九伦, 赵凤. 灰度图像的二维Otsu曲线阈值分割法[J]. 电子学报, 2007, 35(4): 751-755. doi: 10.3321/j.issn:0372-2112.2007.04.029 [15] DENG X L, THOMASSON A J, PUGH A N, et al. Estimating the severity of sugarcane aphids infestation on sorghum with machine vision[J]. International Journal of Precision Agricultural Aviation, 2018, 1(1): 89-96. doi: 10.33440/j.ijpaa.20200302.89
[16] 赵高长, 张磊, 武风波. 改进的中值滤波算法在图像去噪中的应用[J]. 应用光学, 2011, 32(4): 678-682. doi: 10.3969/j.issn.1002-2082.2011.04.017 [17] DIWAKAR M, KUMAR M. A review on CT image noise and its denoising[J]. Biomedical Signal Processing and Control, 2018, 42: 73-88. doi: 10.1016/j.bspc.2018.01.010
[18] BEHARA K N S, BHASKAR A, CHUNG E. A DBSCAN-based framework to mine travel patterns from origin-destination matrices: Proof-of-concept on proxy static OD from Brisbane[J]. Transportation Research Part C: Emerging Technologies, 2021, 131: 103370. doi: 10.1016/j.trc.2021.103370
[19] GIRI K, BISWAS T K, SARKAR P. ECR-DBSCAN: An improved DBSCAN based on computational geometry[J]. Machine Learning with Applications, 2021, 6: 100148. doi: 10.1016/j.mlwa.2021.100148
[20] 张堡瑞, 肖宇峰, 郑又能. 基于激光雷达与视觉融合的水面漂浮物检测[J]. 应用激光, 2021, 41(3): 619-628. [21] 黄强, 潘常春, 裴凌, 等. 基于可重构标定板的激光与视觉联合标定方法[J]. 导航定位与授时, 2021, 8(3): 27-33. [22] 卢莉萍, 张晓倩. 复杂环境下多传感器目标识别的数据融合方法[J]. 西安电子科技大学学报, 2020, 47(4): 31-38. [23] KASPI O, YOSIPOF A, SENDEROWITZ H. RANdom SAmple Consensus (RANSAC) algorithm for material-informatics: Application to photovoltaic solar cells[J]. Journal of Cheminformatics, 2017, 9(1): 1-15. doi: 10.1186/s13321-016-0187-6
[24] 杨洋, 张博立, 查家翼, 等. 玉米行间导航线实时提取[J]. 农业工程学报, 2020, 36(12): 162-171. doi: 10.11975/j.issn.1002-6819.2020.12.020