Orchard robot navigation in unstructured environment based on density adaptive RANSAC
-
摘要:目的
提出一种基于多传感器融合的果园导航方案,解决果园机器人在GPS导航过程中受果树遮挡导致信号弱、定位效果差的问题。
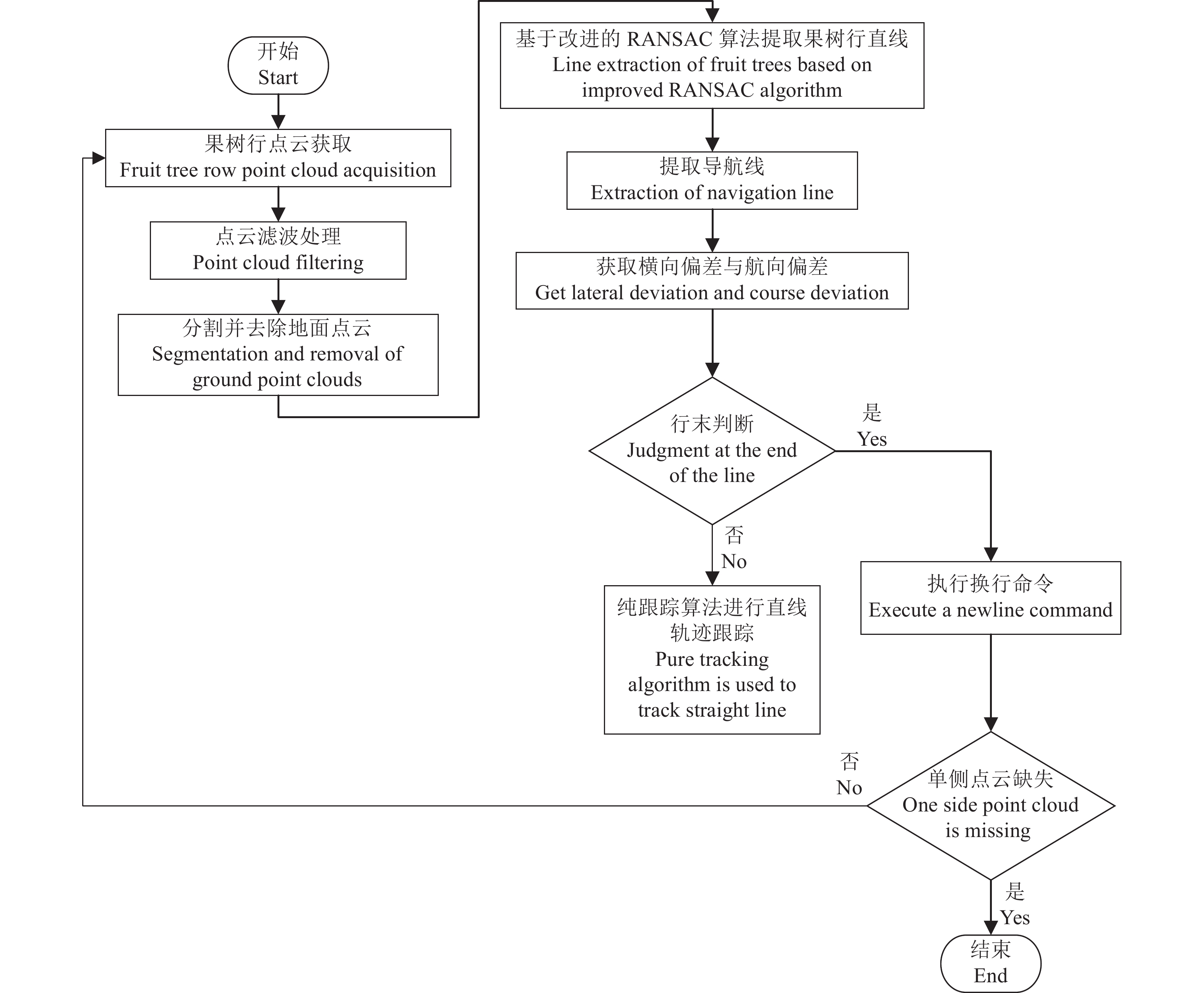
方法通过16线激光雷达采集高精度的三维点云数据,利用Voxel grid filter滤波算法进行点云预处理,降低点云密度并去除离散点,将果树行通过欧几里类算法进行聚类,采用改进的随机采样一致性 (Random sample consensus, RANSAC) 算法拟合出果树行直线,根据平行直线的关系,推算得到导航线,并融合惯性测量单元(Inertial measurement unit, IMU)对果园机器人进行高精度定位。基于差速转向和纯追踪模型进行轨迹跟踪,实现果园机器人在果树行间自主导航以及自动换行的目标。
结果在将激光雷达和IMU的数据进行融合后,获取到果园机器人的准确位姿,当机器人以速度0.8 m/s在果园作业时,对比最小二乘法和传统RANSAC法产生的偏差,基于密度自适应RANSAC法产生的横向偏差不超过0.1 m、航向角偏差不超过1.5°,均为3种方法中的最小值。但当机器人速度增加到1.0 m/s时,各项偏差均明显增大。
结论本文提出的基于多传感器融合的果园机器人导航技术适用于大多数规范化果园,具有重要推广价值。
-
关键词:
- 农业机器人 /
- 自主导航 /
- 直线拟合 /
- 差速转向 /
- 改进RANSAC算法
Abstract:ObjectiveAn orchard navigation scheme based on multi-sensor fusion was proposed to solve the problems of weak signal and poor positioning effect caused by tree occlusion in the GPS navigation process of orchard robot .
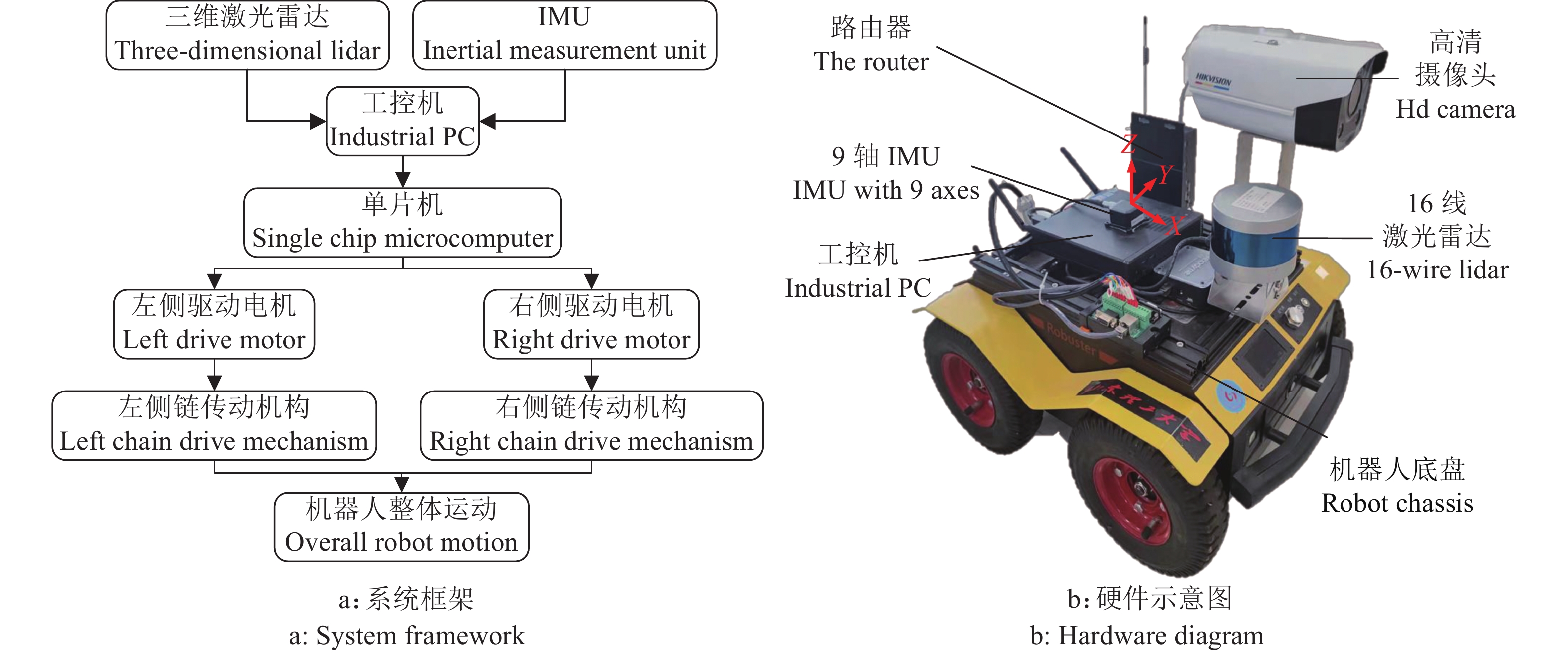
MethodHigh-precision 3D point cloud data were collected by 16-line lidar, point cloud was preprocessed by Voxel grid filter algorithm, point cloud density was reduced and discrete points were removed, fruit tree rows were clustered by Euclidian algorithm, and the straight lines of fruit tree rows were fitted by improved random sampling consistency (RANSAC) algorithm. According to the relationship of parallel lines, the navigation line was calculated and integrated with inertial measurement unit (IMU) for high-precision positioning of orchard robot. Based on differential steering and pure tracking model, the goal of autonomous navigation and automatic line wrapping of orchard robot was realized.
ResultAfter the data fusion of lidar and IMU, the accurate position and pose of the robot were obtained. Compared with the deviation produced by the least square method and the traditional RANSAC method, the lateral deviation based on density adaptive RANSAC method was less than 0.1 m and the heading angle deviation was less than 1.5° when the robot was operating in the orchard at the speed of 0.8 m/s. The deviations were the minimum in the three methods. However, when the robot speed increased to 1.0 m/s, all the deviations increased obviously.
ConclusionThe orchard robot navigation technology based on multi-sensor fusion proposed in this paper is suitable for most standardized orchards and has important promotion value.
-
球孢白僵菌Beauveria bassiana是一种重要的昆虫病原真菌,广泛用于农林业害虫防治,其寄主广泛,包括鳞翅目、半翅目、鞘翅目、膜翅目、等翅目、双翅目、蜚蠊目、直翅目、缨翅目、蜱螨目等类群的上千种节肢动物[1-2]。球孢白僵菌作为一种主要的微生物杀虫剂在全球主要经济体中都有登记,因其环境友好、不易产生抗性以及安全性好等优点而广受欢迎,特别是在有机农业生产体系,以及松毛虫、玉米螟等农林业害虫防治中占有重要地位[3-4]。但是,白僵菌杀虫剂的防治效果受多种因素(如高温、干燥及紫外线)影响,杀虫速度较慢,防效不稳定,这限制了其大规模的推广应用[1]。
植物源农药也是一类重要的生物农药,因其来自植物体本身,在自然环境中易降解,无残留,环境相容性好,对非靶标生物安全。除虫菊素是最早使用的植物源杀虫剂之一,是由菊科植物除虫菊Tanacetum cinerariifolium产生的一种次生化合物,由6种同系物(除虫菊素I和II、瓜叶菊素I和II以及茉酮菊素I和II,其中除虫菊素I和II含量占绝大部分)组成。除虫菊素的应用范围广泛,但除虫菊素在使用过程中,见光易分解,降解速度较快,持效期短,对害虫的防治效果被大幅削弱,并且天然除虫菊素的生产成本很高,产品价格昂贵,难以在生产实际中应用[5]。
为提升防治效果并扩大使用范围,将球孢白僵菌、除虫菊素与其他杀虫剂混合施用引起研究人员的兴趣。有研究报道将球孢白僵菌与生物杀虫剂(如苏云金杆菌和印楝素或其他植物的提取物[6-9]),以及除虫菊素与天竺葵、广藿香或德克萨斯雪松等植物精油[10]混合应用于有机农业。然而,大多数研究都集中于球孢白僵菌与化学杀虫剂的联合施用,存在安全风险,阻碍其在有机农业中的应用[4, 11-13]。有少数研究涉及除虫菊素与其他杀虫剂的复配作用,例如除虫菊素与烯虫酯混配增效防治甲壳虫幼虫[14],甲基嘧啶磷与除虫菊素复配增效防治玉米上的米蛾[15]。综合以往研究可见,球孢白僵菌及除虫菊素的混配增效与应用仍有许多工作可做,研发出效果好、成本低的混配组合和适当制剂将具有较好的应用前景。
本研究在室内条件下生物测定、筛选球孢白僵菌与除虫菊素的混配增效组合,并在田间开展球孢白僵菌·除虫菊素可分散油悬浮剂(Dispersible oil suspension of Beauveria bassiana·pyrethrins,BbPy OD)对蚜虫、烟粉虱和黄曲条跳甲的防效试验,测定该制剂田间杀虫效果,为害虫防控提供新的选择。
1. 材料与方法
1.1 供试球孢白僵菌培养与纯孢粉制备
取供试球孢白僵菌BbPs01菌株(广东省微生物菌种保藏中心保藏号GDMCC
61494 )[16]斜面菌种,刮取少量分生孢子接种至PDA平板,于26 ℃培养箱培养7 d,将上述平板内分生孢子接种到种子培养基(马铃薯葡萄糖培养基)培养3 d。将435 g大米装入聚丙烯塑料袋中灭菌备用,取65 g种子液接种于每袋大米中,于26 ℃固体发酵2周,用$\varphi $ 为0.02%的吐温−80将大米发酵基质中的孢子洗出,过滤得孢子悬浮液,5 000 r/min离心富集5 min,弃上清液,取沉淀,冷冻干燥3 d后得纯孢粉,封装备用。1.2 球孢白僵菌与除虫菊素对棉蚜的室内生物活性测定
称取适量纯孢粉,经检测,纯孢粉的活孢率为91.75%,含孢量为1.77×1011/g。称取干燥孢子粉于25 mL离心管中,用
$\varphi $ 为0.02%的吐温−80溶液悬浮配制成565 mg/mL(有效成份即活孢子含量,相当于1×109/mL)的贮备液,再用$\varphi $ 为0.02%的吐温−80将贮备液稀释成0.57、2.83、5.65、28.25、56.50 mg/L的工作液用于生物测定。将除虫菊素原油(有效成份体积分数为71.78%,云南南宝生物科技有限责任公司)用微量二甲基亚砜溶解,然后用
$\varphi $ 为0.02%的吐温−80稀释成1000 mg/mL(有效成份质量浓度)贮备液,再用0.02%($\varphi $ )吐温−80将贮备液稀释成1、3、5、10、15 mg/L的工作液用于生物测定。生物测定方法参照农业标准《农药室内生物测定试验准则:杀虫剂:第9部分:喷雾法》(NY/T 1154.9—2008)[17]进行。挑选2~3龄健康棉蚜Aphis gossypii至黄瓜Cucumis sativus叶片背面,每个叶片20头,置于Potter喷雾塔底盘下方喷雾3 mL,沉降1 min,置于温度26 ℃、相对湿度50%~90%、光照周期12 h光/12 h暗的培养箱中。以
$\varphi $ 为0.02%的吐温−80作为对照组,重复3次,处理后观察并记录棉蚜死亡情况,计算校正死亡率。$$ \mathrm{死}\mathrm{亡}\mathrm{率}=\dfrac{\mathrm{死}\mathrm{亡}\mathrm{虫}\mathrm{数}}{\mathrm{试}\mathrm{验}\mathrm{前}\mathrm{总}\mathrm{虫}\mathrm{数}}\times 100 {{{\text{%}}}} \text{,} $$ (1) $$ \mathrm{校}\mathrm{正}\mathrm{死}\mathrm{亡}\mathrm{率}=\dfrac{\mathrm{处}\mathrm{理}\mathrm{死}\mathrm{亡}\mathrm{率}-\mathrm{对}\mathrm{照}\mathrm{死}\mathrm{亡}\mathrm{率}}{1-\mathrm{对}\mathrm{照}\mathrm{死}\mathrm{亡}\mathrm{率}}\times 100 {{{\text{%}}}} 。 $$ (2) 采用DPS软件进行Probit回归分析和LC50评估[18],采用协同毒力指数(Cotoxicity factor,c. f.)评价白僵菌和除虫菊素的协同毒力[19];c. f. ≤ −20%表示拮抗,−20% < c. f. < 20%表示相加,c. f. ≥ 20%表示增效。
$$ {{\mathrm{c}}.}{{\mathrm{f}}.}= \dfrac{{混合剂死亡率}-{白僵菌}{处理组}{死亡率}-{除虫菊素}{处理组}{死亡率}}{{白僵菌}{处理组}{死亡率}+{除虫菊素}{处理组}{死亡率}} \times 100 {\text{%}} 。 $$ (3) 1.3 球孢白僵菌·除虫菊素可分散油悬浮剂配置及其生物活性测定
1.3.1 制剂配制
参照刘辉等[20]研发的制剂配方配制
$\varphi $ 为1.0%的球孢白僵菌·除虫菊素可分散油悬浮剂(1.0% BbPy OD),经检测,制剂析油率、倾倒性及悬浮率均符合国家标准(GB/T 31737—2015[21]和GB/T 14825—2023[22])。1.3.2 制剂对棉蚜的室内活性测定
分别用水将1.0% BbPy OD与阳性对照1.5%(
$\varphi $ )除虫菊素水乳剂(1.5% Pyrethrins emulsion in water,1.5% Py EW)稀释1 000、2 000、3 000、5 000、10 000倍,以等量ddH2O为空白对照,参照“1.2”采用喷雾法进行生物测定,每个处理重复3次,观察记录3 d内蚜虫的死亡情况,计算死亡率,并计算毒力回归方程与LC50。对处理后的虫体进行保湿培养,在体式显微镜(SZ810,重庆奥特光学仪器有限公司)下观察并拍摄棉蚜的形态变化与症状。1.3.3 制剂对棉蚜和烟粉虱的田间防效测定
参照农业标准(NY/T
1464.43 —2012)[23]进行防控烟粉虱和棉蚜的田间小区药效试验。于2023年6—7月,在中国浙江省嘉善县进行防治黄瓜棉蚜与番茄烟粉虱的试验。黄瓜的小区面积为50 m2,番茄的小区面积为30 m2。1.0% BbPy OD用水稀释500、1 000倍,1.5% Py EW用水稀释500倍,将稀释液喷洒在黄瓜(每小区喷洒20 L)或番茄(每小区喷洒15 L)的植物冠层上,每个处理重复3次。记录处理前和处理后3 d内的害虫数目,根据下式计算害虫种群减退率(RI)、校正害虫种群减退率(CRI)和防治效果(CE)。$$ \mathrm{R}\mathrm{I}=\dfrac{(\mathrm{B}\mathrm{I}-\mathrm{A}\mathrm{I})}{\mathrm{B}\mathrm{I}}\times 100\mathrm{{\text{%}}} \text{,} $$ (4) $$ \mathrm{C}\mathrm{R}\mathrm{I}=\dfrac{(\mathrm{R}\mathrm{I}_{\mathrm{t}\mathrm{r}}-\mathrm{R}\mathrm{I}_{\mathrm{c}\mathrm{k}})}{100-\mathrm{R}\mathrm{I}_{\mathrm{c}\mathrm{k}}}\times 100\mathrm{{\text{%}}} \text{,} $$ (5) $$ \mathrm{C}\mathrm{E}=\dfrac{\mathrm{C}\mathrm{R}\mathrm{I}_{\mathrm{t}\mathrm{r}}-\mathrm{C}\mathrm{R}\mathrm{I}_{\mathrm{c}\mathrm{k}}}{100-\mathrm{C}\mathrm{R}\mathrm{I}\mathrm{c}\mathrm{k}}\times 100\mathrm{{\text{%}}} \text{,} $$ (6) 式中,BI、AI分别为处理前、后活虫数,RIck、RItr分别是对照组、处理组害虫种群减退率,CRIck、CRItr分别是对照组、处理组校正害虫种群减退率。
1.3.4 制剂对黄曲条跳甲的田间防效测定
试验设在广东省惠州市惠东县伦信农业有限公司大棚,于2023年3—4月进行,设置3个处理:1.0% BbPy OD、1.5% Py EW(阳性对照)和ddH2O(阴性对照)。每个处理小区面积为1 333.4 m2,作物为菜心,在菜心播种后40 d施药,喷洒到植物冠层上,1.0% BbPy OD、1.5% Py EW用量分别为0.7 L·hm−2、3.0 L·hm−2,每小区喷洒100 L,施药2次。在第1次施药1、3、5 d后调查植株受害情况;第2次施药为第1次施药5 d后,查看施药1、3、5、7、11 d后植株受害情况。参照国家标准(GB/T 17980.18—2000)[24],根据被害指数评估防治效果。
$$ \mathrm{被}\mathrm{害}\mathrm{指}\mathrm{数}=\dfrac{\mathrm{\Sigma }(\mathrm{各}\mathrm{级}\mathrm{被}\mathrm{害}\mathrm{叶}\mathrm{数}\times \mathrm{各}\mathrm{级}\mathrm{代}\mathrm{表}\mathrm{值})}{\mathrm{调}\mathrm{查}\mathrm{总}\mathrm{叶}\mathrm{数}\times 9}\times 100\mathrm{{\text{%}}} \text{,} $$ (7) $$ \mathrm{防}\mathrm{治}\mathrm{效}\mathrm{果}=\left(1-\dfrac{\mathrm{C}\mathrm{K}_1\times \mathrm{P}\mathrm{T}_2}{\mathrm{C}\mathrm{K}_2\times \mathrm{P}\mathrm{T}_1}\right)\times 100\mathrm{{\text{%}}} 。 $$ (8) 式中,CK1、CK2分别为对照组施药前、后的被害指数,PT1、PT2分别为处理组施药前、后的被害指数。
1.4 数据处理与分析
采用Microsoft Excel软件进行数据分析,统计害虫死亡率和制剂防治效果。利用软件IBM SPSS Statistics 25.0进行分析,采用Duncan’s法分析各处理组的显著差异性,P<0.05为差异显著,并计算LC50、95%置信区间等。
2. 结果与分析
2.1 球孢白僵菌与除虫菊素对棉蚜的室内活性
棉蚜的死亡率与球孢白僵菌、除虫菊素呈剂量依赖效应,与处理后时间也呈正相关(图1)。经毒力回归分析发现,球孢白僵菌处理后4、5 d的LC50分别为19.65、5.24 mg/L,除虫菊素处理后2、3 d的LC50分别为6.52、3.62 mg/L(表1)。
![图 1 球孢白僵菌(A)与除虫菊素(B)对棉蚜的室内活性]() 图 1 球孢白僵菌(A)与除虫菊素(B)对棉蚜的室内活性Figure 1. Bioactivity of Beauveria bassiana (A) and pyrethrins (B) against Aphis gossypii in lab表 1 球孢白僵菌与除虫菊素对棉蚜的室内毒力回归分析1)Table 1. Probit regression analysis of Beauveria bassiana and pyrethrins against Aphis gossypii in lab
图 1 球孢白僵菌(A)与除虫菊素(B)对棉蚜的室内活性Figure 1. Bioactivity of Beauveria bassiana (A) and pyrethrins (B) against Aphis gossypii in lab表 1 球孢白僵菌与除虫菊素对棉蚜的室内毒力回归分析1)Table 1. Probit regression analysis of Beauveria bassiana and pyrethrins against Aphis gossypii in lab杀虫剂
Insecticidet处理后/d
Days after treatment毒力回归方程
Toxic regression equation相关系数
r${\chi}^2 $ LC50/
(mg·L−1)95%置信区间/(mg·L−1)
95% Confidence interval球孢白僵菌
Beauveria bassiana4 y=1.513 8x+3.042 1 0.996 5 3.401 8 19.65 16.29~24.47 5 y=1.911 5x+3.624 7 0.995 7 5.577 2 5.24 4.57~5.98 除虫菊素
Pyrethrins2 y=1.569 8x+3.721 4 0.980 9 7.033 8 6.52 5.71~7.57 3 y=1.515 9x+4.153 1 0.986 8 4.994 2 3.62 3.12~4.15 2.2 球孢白僵菌与除虫菊素混用的联合毒力
在处理后2 d,球孢白僵菌与除虫菊素混配组合对蚜虫的活性全部表现为相加作用。在处理后3 d,球孢白僵菌、除虫菊素以质量比0.8∶0.2、1.8∶0.2、0.7∶0.3、0.6∶0.4、0.5∶0.5组合表现出增效作用,其中0.7∶0.3的协同毒力指数最大(30.37)(表2)。因此,选择球孢白僵菌、除虫菊素质量比0.7∶0.3组合制备1.0% BbPy OD。
表 2 除虫菊素与球孢白僵菌混配对棉蚜的室内联合活性Table 2. Joint activity of pyrethrins and Beauveria bassiana against Aphis gossypii in labρ(杀虫剂)/(mg·L−1)
Insecticide mass concentration校正死亡率/%
Corrected mortality协同毒力指数/%
Cotoxicity factor球孢白僵菌
Beauveria bassiana除虫菊素
Pyrethrins1 d 2 d 3 d 2 d 3 d 4.9 0.1 30.29±2.37 56.98±4.29 95.55±6.53 −2.40 −6.34 4.9 32.58±3.62 55.26±5.21 92.28±5.92 0.9 0.1 10.33±2.01 0.67±3.21 78.56±5.59 18.33 14.64 0.9 11.22±2.03 31.25±2.17 58.79±4.42 0.1 0 3.12±1.26 9.74±1.85 3.7 0.3 9.59±2.31 56.81±4.92 93.59±6.72 −1.58 −7.20 3.7 30.25±3.15 52.14±4.96 89.56±6.12 0.7 0.3 9.59±2.31 45.42±4.15 87.88±5.03 11.21 30.37 0.7 8.95±2.12 35.26±3.28 56.12±4.19 0.3 0 5.58±1.23 11.29±2.10 3.5 0.5 10.29±1.28 48.98±2.18 91.59±5.58 −17.65 −4.98 3.5 8.56±1.54 49.89±4.58 85.13±5.86 0.5 0.5 4.57±1.35 35.22±2.56 88.45±5.09 0.97 20.55 0.5 0 25.29±2.57 62.11±4.01 0.5 1.25±1.02 9.59±1.52 11.26±2.56 1.8 0.2 11.84±3.25 45.15±3.06 87.02±4.57 1.46 29.38 1.8 25.51±2.28 39.99±2.88 57.12±3.56 0.8 0.2 5.59±1.21 38.95±2.59 81.55±5.01 12.15 24.92 0.8 12.58±1.95 30.22±2.26 55.14±4.49 0.2 1.35±1.08 4.51±1.11 10.14±1.14 1.6 0.4 13.56±3.69 38.14±3.15 86.57±5.29 6.75 17.54 1.6 24.58±3.21 29.48±2.27 63.29±4.15 0.6 0.4 12.51±1.85 44.26±3.24 84.15±5.95 18.72 28.47 0.6 6.17±2.36 31.03±2.37 55.14±4.88 0.4 2.55±1.28 6.25±1.14 10.36±1.36 0.02%($\varphi $)吐温−80(CK) 0.02%($\varphi $)Tween-80 0 3.33±4.71 6.67±6.24 2.3 球孢白僵菌·除虫菊素可分散油悬浮剂的生物活性
2.3.1 1.0% BbPy OD对棉蚜的室内活性
1.0% BbPy OD稀释1 000倍时棉蚜死亡率可达96%,稀释至5 000倍时死亡率低于50%;1.5% Py EW稀释1 000倍时棉蚜死亡率为80%,稀释至3 000倍时死亡率为50%。相同稀释倍数下,经1.0% BbPy OD处理后的蚜虫死亡率高于1.5% Py EW,杀虫效果优于1.5% Py EW(表3)。1.0% BbPy OD和1.5% Py EW的毒力回归方程分别为y=2.625 2x+4.219 9、y=1.885 1x+3.674 7,二者的校正死亡率与制剂浓度呈正相关;2种药剂处理后3 d的LC50分别为1.98和5.05 mg/L,表明棉蚜对1.0% BbPy OD制剂更为敏感(表4)。经1.0% BbPy OD处理后的棉蚜体表长有白色菌丝(图2)。
表 3 1.0% BbPy OD对棉蚜的室内活性1)Table 3. Toxicity of 1.0% BbPy OD against Aphis gossypii in lab处理
Treatment稀释倍数
Dilution ratioρ(有效成份)/(mg·L−1)
Effective ingredient mass
concentration校正死亡率/%
Corrected mortality球孢白僵菌
Beauveria bassiana除虫菊素
Pyrethrins1 d 2 d 3 d 1.0% BbPy OD 1 000 7.00 3.00 20.00±4.08b 42.86±1.79ab 96.23±4.71a 2 000 3.50 1.50 11.67±4.71bc 32.14±2.14bc 88.68±8.16a 3 000 2.33 1.00 15.00±4.08bc 19.64±4.08cd 72.58±8.50ab 5 000 1.40 0.60 13.33±2.36bc 17.85±2.36cd 43.39±5.80cd 10 000 0.70 0.30 11.67±2.36bc 16.07±6.24cd 25.00±2.10de 1.5% Py EW 1 000 0.00 15.00 46.67±4.43a 65.00±4.80a 83.33±7.47a 2 000 0.00 7.50 16.67±1.27bc 46.67±1.57ab 61.67±4.27bc 3 000 0.00 5.00 11.67±2.24bc 26.67±4.71cd 50.00±3.33cd 5 000 0.00 3.00 8.33±2.36bc 18.33±2.36cd 28.33±6.24def 10 000 0.00 1.50 5.00±2.08c 8.33±2.36d 19.44±1.07ef ddH2O(CK) 0.00 0.00 3.33±1.71c 6.67±1.66d 6.67±1.66f 1)同列数据后的不同小写字母表示处理间在P<0.05水平差异显著(Duncan’s法);CK为死亡率,其余数值均为校正死亡率。
1)Different lowercase letters after the same column data indicate significant differences among treatments at P<0.05 level (Duncan’s method); CK is mortality rate, and the rest values are corrected mortality.表 4 处理后3 d 1.0% BbPy OD对棉蚜的毒力回归分析Table 4. Virulence regression analysis of 1.0% BbPy OD against Aphis gossypii on day 3 after treatment处理
Treatment毒力回归方程
Toxic regression equation相关系数
r${\chi}^2 $ LC50/
(mg·L−1)95%置信区间/(mg·L−1)
95% Confidence interval1.0% BbPy OD y=2.625 2x+4.219 9 0.990 3 6.695 4 1.98 1.77~2.18 1.5% Py EW y=1.885 1x+3.674 7 0.989 1 4.274 1 5.05 4.53~5.64 ![图 2 1.0% BbPy OD处理后的棉蚜形态]() 图 2 1.0% BbPy OD处理后的棉蚜形态Figure 2. Morphology of Aphis gossypii after 1.0% BbPy OD treatment
图 2 1.0% BbPy OD处理后的棉蚜形态Figure 2. Morphology of Aphis gossypii after 1.0% BbPy OD treatment2.3.2 1.0% BbPy OD对黄瓜棉蚜的田间防效
不同稀释倍数的1.0% BbPy OD均对黄瓜棉蚜有良好的防治效果,处理后3 d时,田间防治效果均接近90%(表5)。稀释400倍时的防治效果最好,在处理后第3天防治效果高达94.33%。对照组蚜虫迅速繁殖,害虫数量减少率为负值。
表 5 1.0% BbPy OD在处理后不同天数对黄瓜棉蚜的田间防效1)Table 5. Control effect of 1.0% BbPy OD against Aphis gossypii on cucumber in field on different days after treatment% 稀释倍数
Dilution ratio1 d 2 d 3 d 400 91.28±2.14a 93.93±6.98a 94.33±4.50a 600 68.84±3.04b 83.02±5.17a 87.63±1.82a 800 80.26±8.99ab 83.74±6.93a 87.83±7.35a 1)同列数据后的不同小写字母表示处理间在P<0.05水平差异显著(Duncan’s法)。
1)Different lowercase letters after the same column data indicate significant differences among treatments at P<0.05 level (Duncan’s method).2.3.3 1.0% BbPy OD对番茄烟粉虱的田间防效
处理后1 d,不同稀释倍数的1.0% BbPy OD对烟粉虱的防效均在70%以上;处理后2、3 d,1.0% BbPy OD对烟粉虱的防治效果为82%~91%,显著高于1.5% Py EW的62%~77%。1.0% BbPy OD稀释500倍时,在第3天防效达91.47%;稀释1 000倍时,在第3天防效达91.90%,有良好的防治效果(表6)。
表 6 1.0% BbPy OD在处理后不同天数对番茄烟粉虱的田间防效1)Table 6. Control effect of 1.0% BbPy OD against Bemisia tabaci on tomato in field on different days after treatment% 处理
Treatment稀释倍数
Dilution ratio1 d 2 d 3 d 1.0% BbPy OD 500 80.06±6.71a 84.73±2.87a 91.47±3.05a 1 000 73.61±5.59a 82.82±11.10a 91.90±5.01a 1.5% Py EW 500 59.32±4.56b 62.24±4.20b 77.56±5.14b 1)同列数据后的不同小写字母表示处理间在P<0.05水平差异显著(Duncan’s法)。
1)Different lowercase letters after the same column data indicate significant differences among treatments at P<0.05 level (Duncan’s method).2.3.4 1.0% BbPy OD对黄曲条跳甲的田间防效
1.0% BbPy OD和1.5% Py EW的防治效果明显不同。第1次处理后3 d的防治效果分别为70.89%和45.55%,第2次处理后11 d的防治效果分别为81.63%和48.57%;1.0% BbPy OD制剂对黄曲条跳甲的防治效果最高可达88.51%,1.5% Py EW最高为60.94%。在黄曲条跳甲防治上,1.0% BbPy OD防效良好,优于1.5% Py EW(表7)。
表 7 1.0% BbPy OD在处理后不同天数对白菜黄曲条跳甲的田间防效Table 7. Control effect of 1.0% BbPy OD against Phyllotreta striolata on Chinese flowering cabbage in field on different days after treatment% 处理
Treatment用量/
(L·hm−2)
Dosage第1次处理 The first treatment 第2次处理 The second treatment 1 d 2 d 3 d 1 d 3 d 5 d 7 d 11 d 1.0% BbPy OD 0.7 49.91 64.29 70.89 77.45 78.32 81.61 88.51 81.63 1.5% Py EW 3.0 25.05 40.23 45.55 53.85 60.94 59.31 57.53 48.57 3. 讨论与结论
很多研究已证明了球孢白僵菌和除虫菊素在害虫控制中的有效性和局限性,但关于其二元混合物协同作用的报道却很少[8],其原因是多方面的。首先,球孢白僵菌与除虫菊素之间的相容性,尤其是除虫菊素对球孢白僵菌的安全性。研究发现不同除虫菊素对球孢白僵菌菌丝生长和孢子萌发的影响显著不同,这可能是因为除虫菊素的提取方法导致产品中残留了有毒有机溶剂(未发表数据)。其次,这2种物质分别是亲脂性固体(球孢白僵菌,共生菌)和液体(除虫菊素),其加工特性截然不同,这给配方的开发带来了困难;除可分散油悬浮剂、可湿性粉剂外,还局限于开发球孢白僵菌和除虫菊素的其他剂型。此外,混合物的防效是另一个问题。一般来说,混合物需要具有协同效应,或增加应用范围[10, 25-26]。球孢白僵菌和除虫菊素的生物测定方法不同,前者通常使用分生孢子浓度,后者使用质量浓度[27];因此,无法使用共毒系数法或协同乘数法等常用方法评估两者的混合效果。本研究在前期工作中通过引入协同毒力指数解决了这一问题[19]。
本研究提供了球孢白僵菌和除虫菊素二元混合物对蚜虫具有协同作用的证据,这对在有机栽培系统中蚜虫控制的应用非常重要[28-29]。蚜虫是世界范围内分布的多食性农业害虫,繁殖速度快,适应性强,危害严重;以汁液为食,通过直接取食、间接传播病毒以及污染蜜露造成经济损失[30]。二者协同作用机制很有趣,本研究观察到,体表长菌的蚜虫数量约占死亡蚜虫的15%;如果它们不是主要由球孢白僵菌感染杀死,或者主要由除虫菊素杀死,那么真菌和除虫菊素是如何发挥杀虫作用的?这些问题需要更多的研究来解答。
田间药效试验表明,1.0% BbPy OD对烟粉虱和黄曲条跳甲这2种非常重要的蔬菜害虫具有显著的控制效果[31-32]。目前,中国球孢白僵菌和除虫菊素注册的农药产品分别有31和35种(http://www.chinapesticide.org.cn/zwb/dataCenter,2024年4月)。绝大多数除虫菊素产品用于控制室内害虫,如蚂蚁、苍蝇和蟑螂;只有5种产品用于控制十字花科蔬菜和烟草中的蚜虫,以及果树中的叶蝉和尺蠖等害虫;无产品用于控制烟粉虱和黄曲条跳甲。球孢白僵菌同样没有产品注册用于控制黄曲条跳甲。因此,该研究为球孢白僵菌和除虫菊素的应用,以及烟粉虱和黄曲条跳甲的控制提供了控制一种新方法。
本研究表明,球孢白僵菌和除虫菊素的二元混合物具有一定的广谱杀虫活性。事实上,白僵菌菌株BbPs01是从黄曲条跳甲中分离,具有广泛的宿主,如蚜虫、粉虱、跳甲、木虱和叶螨等。同时,除虫菊素也是一种广谱杀虫剂,可控制半翅目、双翅目、蜚蠊目和等翅目等害虫[5]。然而,进一步确定对其他害虫的控制效果,尤其是叶螨和蓟马等微小害虫,对于扩大BbPy OD二元混配剂的应用范围具有实际意义。
球孢白僵菌BbPs01与除虫菊素联合使用对棉蚜有增效作用,对防治田间黄瓜棉蚜、番茄烟粉虱和白菜黄曲条跳甲有显著效果。目前的试验为研究和开发真菌和植物杀虫剂提供了新的视角。
-
![]()
图 2 果园机器人换行策略
dts:换行后直线行驶距离;Rt:转弯半径;v:线速度;$ \omega $:角速度
Figure 2. Line breaking strategy of orchard robot
dts: Straight line driving distance after line break; Rt: Turning radius; v: Linear velocity; $ \omega $: Angular velocity
![]()
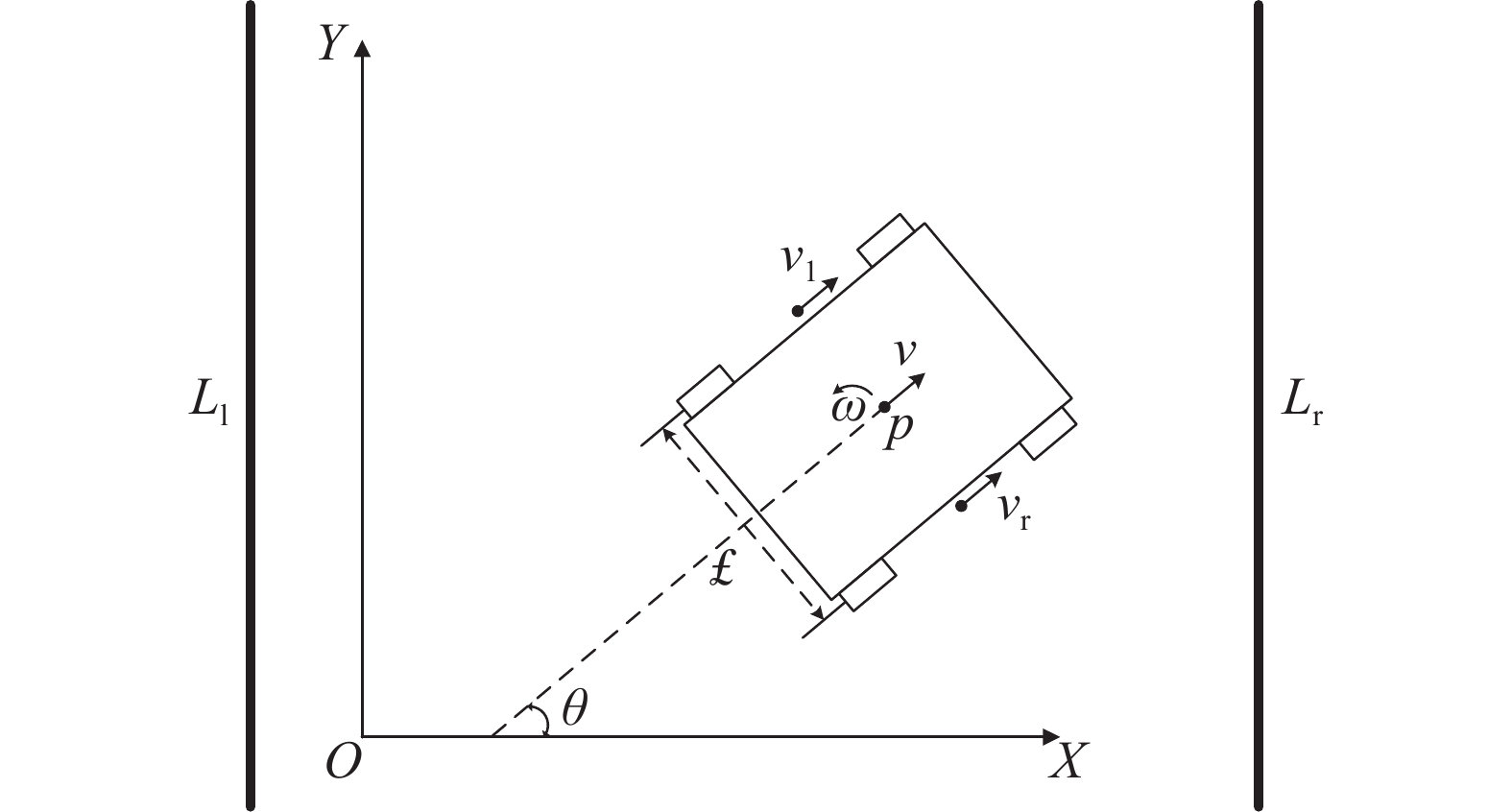
图 3 运动模型
v:线速度;vr:右侧轮速度;vl:左侧轮速度;$ \omega $:角速度;$ \theta $:姿态角;£:轮距;p:机器人中心位置;Ll、Lr:左、右两侧果树行
Figure 3. Motion model
v: Linear velocity; vr: Right wheels speed; vl: Left wheels speed; ω: Angular velocity; θ : Attitude angle; £: Wheelspan; p: Center position of robot; Ll, Lr: Fruit tree rows on the left and right sides
![]()
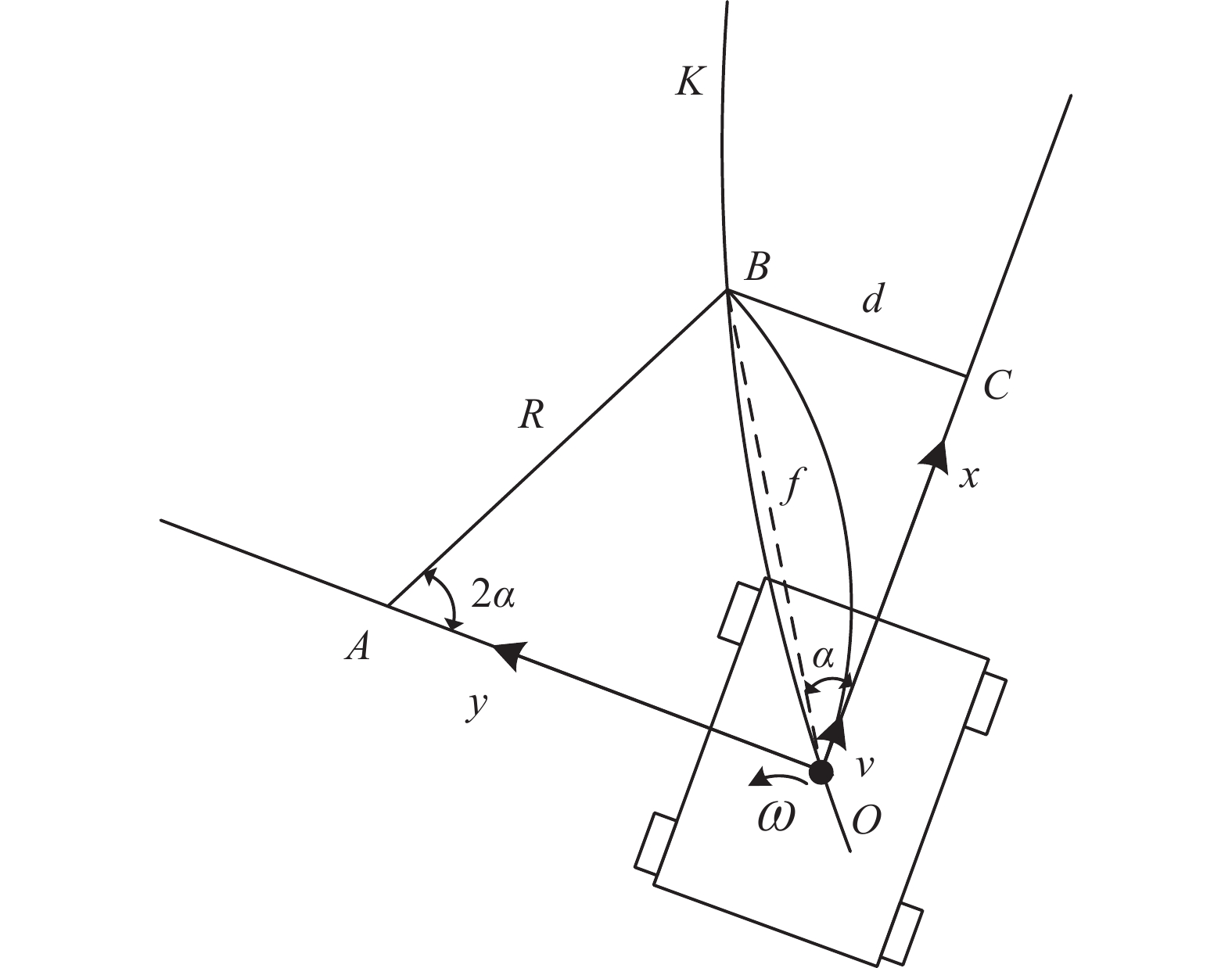
图 4 果园机器人轨迹跟踪示意图
K:目标轨迹;B:目标点;$ \alpha $:航向偏差;f:前视距离;d:横向偏差;A:圆弧轨迹对应的圆心;R:轨迹半径;C:OC边上的垂足;O:机器人中心位置
Figure 4. Orchard robot trajectory tracking diagram
K: Target trajectory; B: Target point; $ \alpha $: Course deviation; f: Forward-looking distance; d: Lateral deviation; A: Center of the arc trajectory; R: Trajectory radius; C: Vertical foot at the edge of OC; O: Robot center position
![]()
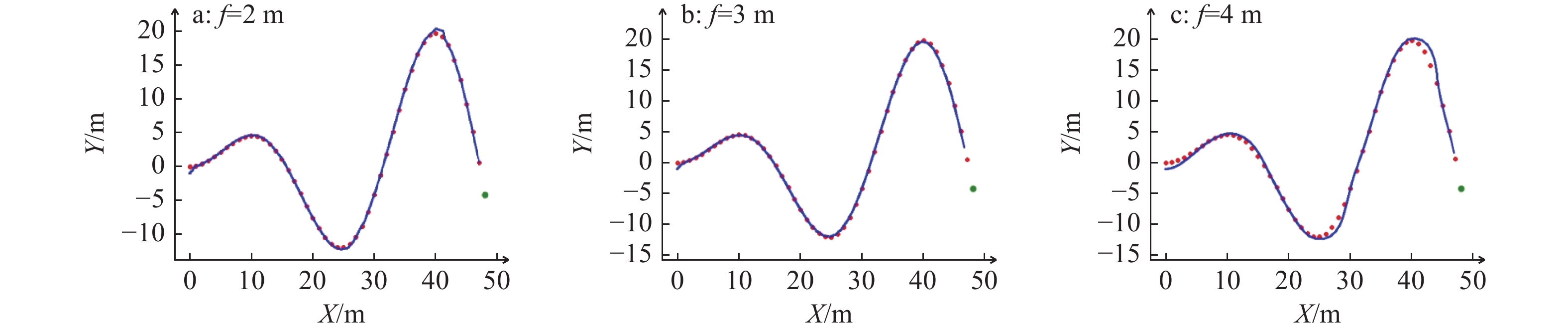
图 5 不同前视距离(f )下路径跟踪仿真结果
红色圆点表示目标轨迹点,绿色圆点表示轨迹终点,蓝色曲线表示实际轨迹
Figure 5. Path tracking results at different forward-viewing distances(f)
The red dots represent the target track points, the green dots represent the end of the track, and the blue curve represents the actual track
![]()
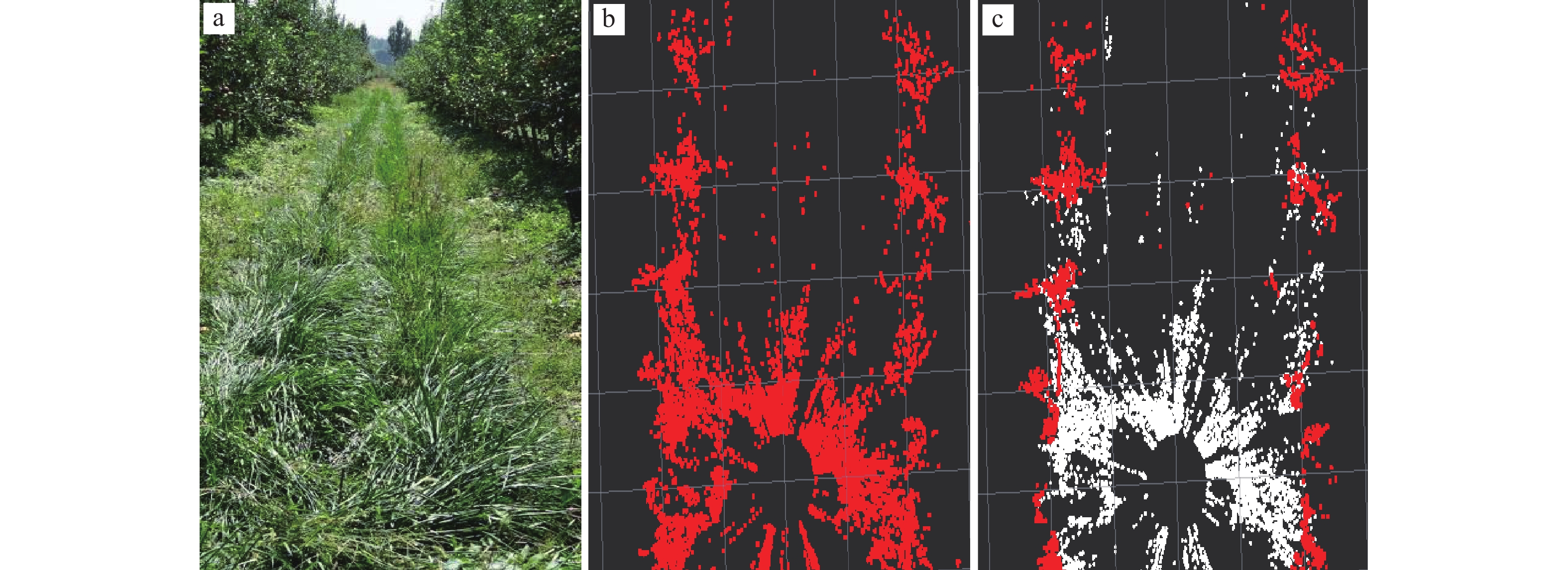
图 7 点云预处理
a:果园真实环境;b:原始点云;c:分割地面后的点云,其中,白色部分为地面点云,红色部分为非地面点云,即果树行点云
Figure 7. Point cloud pretreatment
a: Real environment of the orchard; b: Original point cloud; c: Point cloud after ground segmentation. In c, the white part is ground point cloud, and the red part is non-ground point cloud, namely, fruit tree row point cloud
![]()
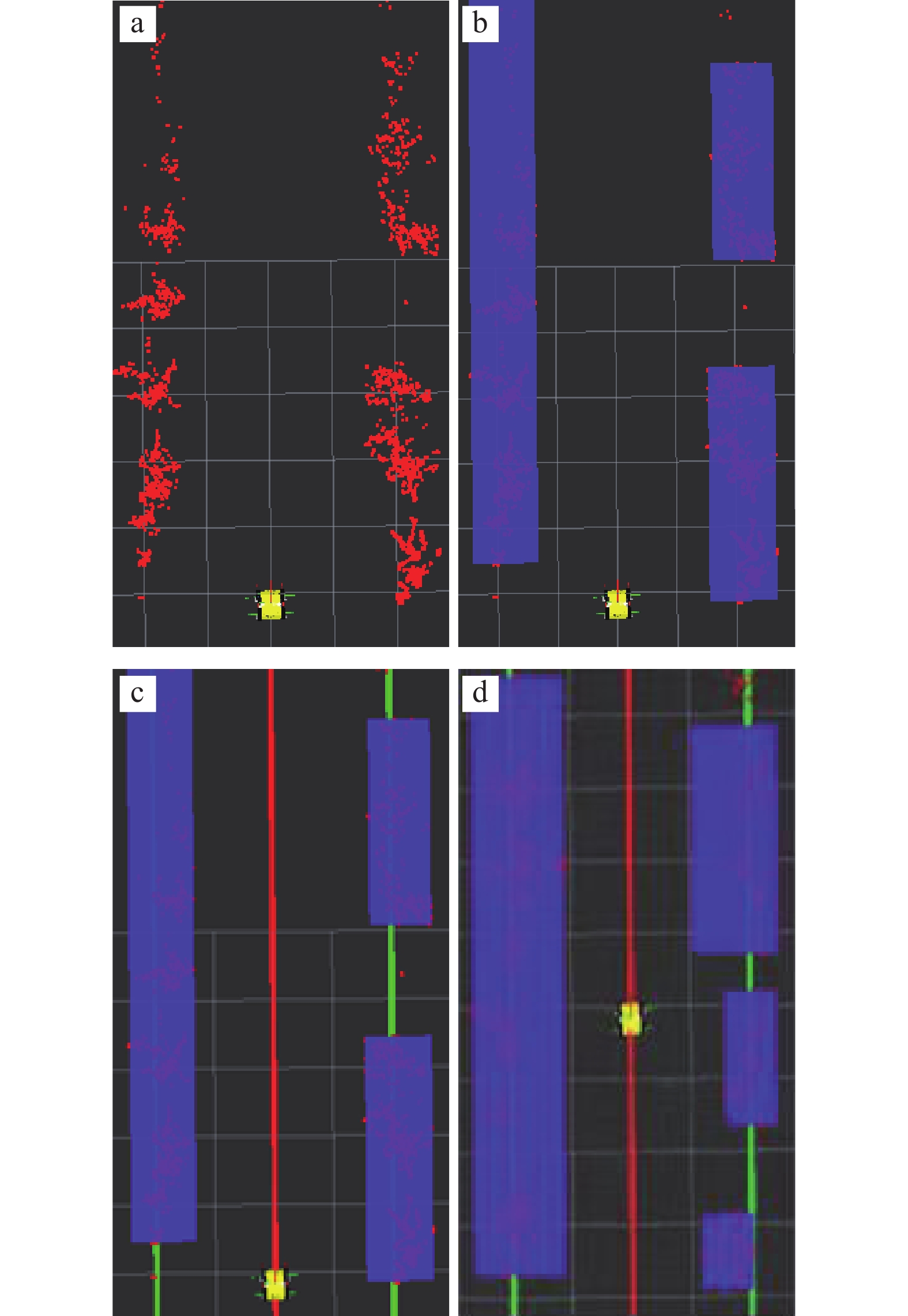
图 8 拟合导航线
a:去除地面后的点云;b:聚类后的点云;c:生成导航线后的点云;d:存在离散果树的点云;c、d中,绿色直线为拟合得到的果树行直线,红色直线为推算得到的导航线
Figure 8. Fitting navigation lines
a: Point cloud after ground removal; b: Point cloud after clustering; c: Point cloud with the navigation line; d: Point clouds with discrete fruit trees. In c and d, the green line is the fruit tree line obtained by fitting, and the red line is the navigation line obtained by calculation
表 1 速度0.8 m/s下3种算法产生的偏差结果
Table 1 The deviation results generated by the three algorithms under the speed of 0.8 m/s
算法
Algorithm横向偏差/m
Lateral deviation平均横向偏差/m
Mean lateral deviation航向偏差/(°)
Course deviation平均航向偏差/(°)
Mean course deviationLSM算法
LSM algorithm0.20
0.18
0.23
0.21
0.190.202 2.1
1.8
2.2
1.7
2.01.96 传统RANSAC算法
Traditional RANSAC algorithm0.16
0.15
0.13
0.18
0.170.158 1.3
1.8
1.5
1.2
1.81.52 改进RANSAC算法
Improved RANSAC algorithm0.08
0.10
0.09
0.07
0.080.084 1.5
1.5
1.2
1.3
1.21.34  下载: 导出CSV
下载: 导出CSV
表 2 速度1.0 m/s下3种算法产生的偏差结果
Table 2 The deviation results generated by the three algorithms under the speed of 1.0 m/s
算法
Algorithm横向偏差/m
Lateral deviation平均横向偏差/m
Mean lateral deviation航向偏差/(°)
Course deviation平均航向偏差/(°)
Mean course deviationLSM算法
LSM algorithm0.25
0.28
0.26
0.23
0.240.252 2.3
2.5
2.6
2.4
2.72.50 传统RANSAC算法
Traditional RANSAC algorithm0.23
0.22
0.24
0.22
0.210.224 2.2
2.4
1.9
2.5
2.62.32 改进RANSAC算法
Improved RANSAC algorithm0.14
0.09
0.08
0.13
0.100.108 2.0
1.8
2.1
2.2
2.02.02
下载: 导出CSV
-
[1] 王祺, 王艳玲, 俄胜哲. 我国果园机械装备现状及发展思路[J]. 农业机械, 2019(1): 109-111. [2] LAN Y B, CHEN S D. Current status and trends of plant protection UAV and its spraying technology in China[J]. International Journal of Precision Agricultural Aviation, 2018, 1(1): 1-9.
[3] GONG J L, WANG M X, ZHANG Y F, et al. Flow and sound field analysis of agricultural ultrasonic atomizing nozzle[J]. International Journal of Precision Agricultural Aviation, 2019, 2(2): 32-37.
[4] 秦喜田, 刘学峰, 任冬梅, 等. 我国果园生产机械化现状及其发展趋势[J]. 农业装备与车辆工程, 2019, 57(S1): 35-38. [5] 张漫, 季宇寒, 李世超, 等. 农业机械导航技术研究进展[J]. 农业机械学报, 2020, 51(4): 1-18. doi: 10.6041/j.issn.1000-1298.2020.04.001 [6] 陈媛媛, 游炯, 幸泽峰, 等. 世界主要国家精准农业发展概况及对中国的发展建议[J]. 农业工程学报, 2021, 37(11): 315-324. doi: 10.11975/j.issn.1002-6819.2021.11.036 [7] 刘成良, 林洪振, 李彦明, 等. 农业装备智能控制技术研究现状与发展趋势分析[J]. 农业机械学报, 2020, 51(1): 1-18. doi: 10.6041/j.issn.1000-1298.2020.01.001 [8] 何勇, 蒋浩, 方慧, 等. 车辆智能障碍物检测方法及其农业应用研究进展[J]. 农业工程学报, 2018, 34(9): 21-32. doi: 10.11975/j.issn.1002-6819.2018.09.003 [9] 李道亮, 李震. 无人农场系统分析与发展展望[J]. 农业机械学报, 2020, 51(7): 1-12. doi: 10.6041/j.issn.1000-1298.2020.07.001 [10] 周建军, 周文彬, 刘建东, 等. 果园机器人自动导航技术研究进展[J]. 计算机与数字工程, 2019, 47(3): 571-576. [11] 李秋洁, 丁旭东, 邓贤. 基于激光雷达的果园行间路径提取与导航[J]. 农业机械学报, 2020, 51(S2): 344-350. doi: 10.6041/j.issn.1000-1298.2020.S2.040 [12] 莫冬炎, 杨尘宇, 黄沛琛, 等. 基于环境感知的果园机器人自主导航技术研究进展[J]. 机电工程技术, 2021, 50(9): 145-150. doi: 10.3969/j.issn.1009-9492.2021.09.038 [13] BLOK P M, SUH H K, VAN BOHEEMEN K, et al. Autonomous in-row navigation of an orchard robot with a 2D LIDAR scanner and particle filter with a laser-beam model[J]. Journal of Institute of Control, Robotics and Systems, 2018, 24(8): 726-735. doi: 10.5302/J.ICROS.2018.0078
[14] 姬长英, 周俊. 农业机械导航技术发展分析[J]. 农业机械学报, 2014, 45(9): 44-54. doi: 10.6041/j.issn.1000-1298.2014.09.008 [15] 赛炜, 孙忠涵. 基于激光雷达的机器人智能导航系统研究[J]. 激光杂志, 2019, 40(11): 182-186. [16] ZHANG H F, HONG Y, QIU J L. An off-policy least square algorithms with eligibility trace based on importance reweighting[J]. Cluster Computing, 2017, 20(4): 3475-3487. doi: 10.1007/s10586-017-1165-0
[17] FOTOUHI M, HEKMATIAN H, KASHANI-NEZHAD M A, et al. SC-RANSAC: Spatial consistency on RANSAC[J]. Multimedia Tools and Applications, 2019, 78(7): 9429-9461. doi: 10.1007/s11042-018-6475-6
[18] SANGAPPA H K, RAMAKRISHNAN K R. A probabilistic analysis of a common RANSAC heuristic[J]. Machine Vision and Applications, 2019, 30(1): 71-89. doi: 10.1007/s00138-018-0973-4
[19] 张华强, 王国栋, 吕云飞, 等. 基于改进纯追踪模型的农机路径跟踪算法研究[J]. 农业机械学报, 2020, 51(9): 18-25. doi: 10.6041/j.issn.1000-1298.2020.09.002