Development and test of auto-navigation system for agricultural machinery based on satellite-based precision single-point positioning
-
摘要:目的
开发基于星基增强精密单点定位的农机自动导航系统。
方法以国产雷沃TX1204拖拉机为平台,采用国产星基增强定位板卡的输出数据作为农机位置反馈量,设计位速卡尔曼滤波器对定位数据进行滤波处理,开发预瞄跟随PID路径跟踪控制算法进行导航控制,整定不同行驶速度条件下的模型控制参数,采用地基增强RTK高精度定位接收机输出数据作为参考量,搭建农机自动导航测试系统并开展系统性能测试。
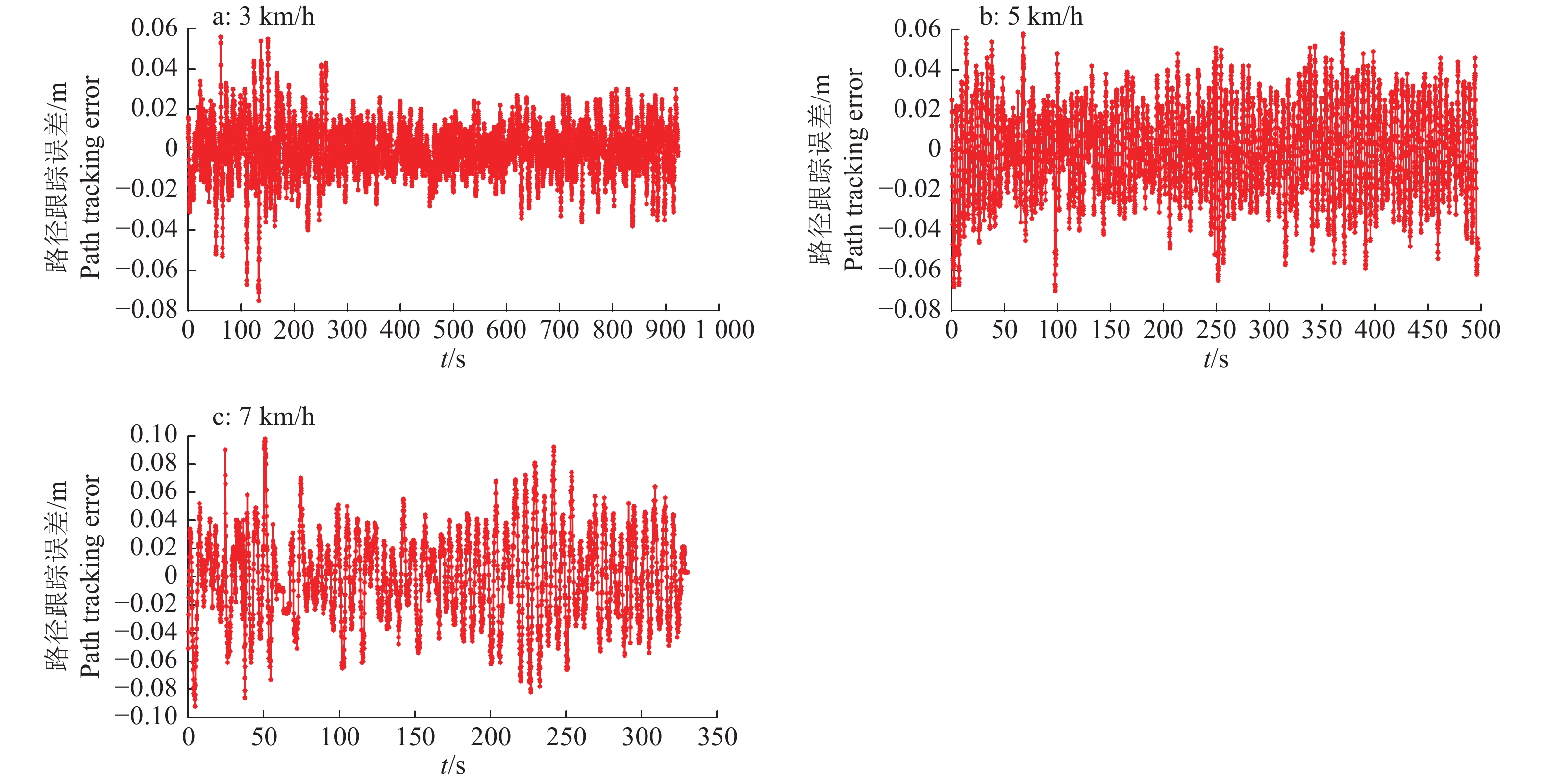
结果在直线跟踪误差方面,所开发的农机自动导航系统平均误差为−0.0009436 m,标准差为0.02452 m,最大误差绝对值为0.08472 m;在邻接行误差方面,平均误差为0.0007128 m,标准差为0.02986 m,最大误差绝对值为0.15444 m。这一精度可满足大部分农机自动导航作业需求。
结论将国产星基增强精密单点定位技术用于农机自动导航是可行的;本文设计的预瞄跟随PID路径跟踪控制模型和提出的不同速度条件下PID参数与前视距离的整定方法,提高了系统对不同速度的自适应能力。
Abstract:ObjectiveTo develop an automatic navigation system for agricultural machinery based on satellite-based precision single-point precision.
MethodWith the domestic Lovol TX1204 tractor as the platform, the output data of the domestic satellite-based precision single-point positioning board were used as the position feedback of the agricultural machinery, the position-velocity Kalman filter was designed to filter the positioning data, and the preview following PID path tracking control algorithm was developed. The model control parameters under different driving speed conditions were tuned, and the output data of the ground-based RTK high-precision positioning receiver were used as the references, the automatic navigation test system of agricultural machinery was built and the system performance test was carried out.
ResultIn terms of linear tracking error, the average error was −0.0009436 m, the standard deviation was 0.02452 m, and the absolute maximum error was 0.08472 m. In terms of adjacent line error, the average error was 0.0007128 m, the standard deviation was 0.02986 m, and the absolute maximum error was 0.15444 m, which could meet the needs of most agricultural machinery automatic driving operations.
ConclusionDomestic satellite-based precision single-point positioning technology can be used for agricultural machinery automatic navigation. The preview-following PID path tracking control model designed in this paper is valid and the proposed method for tuning PID parameters and foresight distance under different speed conditions provides a basis for improving the adaptive ability of this system to different speed conditions.
-
首先,确定母猪具有高产的遗传品质,后备母猪培育与管理到位。这2点是决定猪场PSY的启动基础;其次,合理的胎龄结构,即第2至第5胎(或至6、7胎)的母猪数量比例是另一个关键因素。简而言之,具有高产遗传品质的后备母猪,及1、2胎产仔好是必要条件[1];顺利过渡到3~5胎为主结构的高产母猪群[2-3]是充分条件;后者成为主因时,合理的母猪群体更新率成为非常关键的因素。
选择合适的高产母猪,如丹系、法系和加系母系猪,在管理上严格要求,其中,基于最新高产母猪的正常生产指标应是第1、2胎总产仔数达到30头[4];在后备母猪发育、培育的首配标准上[5],笔者认为,关键点排序如下:
1) 体重:135~170 kg首配,这一点非常重要。一生总产仔数是在135~160 kg首配的最多,经济上也最划算。体重太大,会影响到维持需要及淘汰率、肢蹄问题。体重太小、产仔太多时易造成钙磷流失过度而淘汰。
2) 配种日龄为220~270 d,有研究报道不能超过290 d[6],众多资料表明需让母猪在1岁左右分娩,使用年限才较长;6.5~7.0月龄后,发情期刺激6周内应有90%的后备母猪呈现发情。
3) 背膘为12~18 mm,具体视品系特点而定,体况评分为3.0~3.5。后备母猪背膘控制因品系不同,高产母猪在妊娠期膘情控制应更为严格。
4) 全期日增重(初生至140 kg)为590~850 g。对当代高产母猪而言,生长速度过快过慢都会影响到使用寿命、后备利用率和产仔表现。
5) 维持合适选留率、利用率的流程管控。不是所有母猪都适合留种,各阶段后备猪选育,发情和一生繁殖循环的持续性表现好、使用寿命期长、总产仔数量很重要。在29~31周龄时,母猪选留率能大于60%。
1. 年更新率
年更新率=母猪淘汰率+母猪死亡率,其中后者包括无害化处理和自然或疾病死亡。据报道,在欧洲母猪平均年更新率为43%~52%,平均淘汰胎次为4.3~4.6;法国高产的母猪年更新率是44%[7-9];在美国,母猪的年更新率为54%,包括主动和被动淘汰以及死亡率;平均淘汰胎次为3.3~3.8[10-11]。
美国爱荷华州立大学Ken Stalder教授认为PigCHAMP和Pigtales生产管理软件系统中的更新率分别为60%和53%,淘汰率分别为42%和47%(PigCHAMP全美软件,Pigtales是PIC公司软件);并指出更新率方面,在澳大利亚是63.8%(1992—2002年),巴西2002年为55%(43%淘汰率和5.5%死亡率),加拿大2002年为58%,日本2000年为47.6%。2002 PigCHAMP系统中最好的10%猪场指标为:更新率32.7%、淘汰率22%、死亡率2.8%、淘汰平均胎次在5.5胎。因而,除了高产后备母猪的准备外,合理的胎龄结构、平均淘汰胎次是实现猪场高产的其他关键影响指标。
综合众多研究,建议更新率39%~40%为管理目标的基准,其中淘汰率35%~36%,死亡率3%~5%[12];从理论或经济上来说,胎次不超过8,提供断奶仔猪总数88头是一个管理的基准目标。
2. 淘汰率及原因剖析
能繁母猪是全猪场最有价值的动物即生物资产,据估计40%~50%母猪在第3或4胎之前被淘汰。母猪在分娩1~2胎后被动淘汰时,母猪最大生产能力未得以发挥,替换成本还未得到收回[13-14]。母猪淘汰原因中,约有70%是由于繁殖失败和肢蹄疾病,即被动淘汰是主因[9]。一头母猪在第3胎时才足够抵回/收回成本,当然实际情况因猪场、投资和国家而异[13-15]。高淘汰率增加非生产天数,增加后备母猪数量和引种比例,导致平均窝产仔数、PSY下降[16]。主动淘汰是指数据管理和现场人员决定从能繁母猪群中主动移除母猪的操作流程。原因为达到最大胎次即年老、产仔表现不佳。而被动淘汰是由于繁殖障碍、哺乳问题、肢蹄疾病及死亡。年轻母猪常为被动淘汰之列[17]。美国爱荷华州立大学Ken Stalder教授早期讲课资料中[18],分析过淘汰原因占比,其中繁殖障碍30%~35%;胎龄老化15%~20%;繁殖表现差15%~20%,肢蹄问题10%~15%,死亡5%~10%,产后瘫痪或产后继发问题3%~5%,其他占5%。从结果可看出,主动淘汰即2、3项之和也可占30%~40%,可以成为管理的目标。
在河南农业大学李新建博士等[19]翻译的《妊娠和哺乳母猪》基础上,笔者进行了主动淘汰及被动淘汰的分类。主动淘汰主要为胎龄过老、产仔差等;被动淘汰为繁殖障碍、母猪的肢蹄问题以及母猪死亡等。
因胎龄过老而主动更新的淘汰占比约为9%~31%。产仔差包括窝产仔数少,出生重过轻,断奶不行,乳房和母猪质量不行,母猪因产仔差而淘汰的平均占比为20%~30%,文献记录范围为11%~56%。发情、受胎和分娩即空怀、难产等繁殖障碍是常见的被动淘汰原因,占淘汰数量比约为20%~43%;其中,有34%~43%是胎龄较低的年轻繁殖母猪,与其他动物相比,非生产日龄延长更多。据报道,在母猪群体中有6%~40%(平均10%)的移除淘汰是由于肢蹄问题。据统计,跛行后备母猪产仔数更少,平均利用年限短。研究发现,7%的跛行后备母猪未完成第1胎分娩;13%的跛行后备母猪在第2胎前淘汰;只有约50%的跛行后备母猪生产达到了第4胎。因跛行、肢蹄问题的母猪平均只能达2.93窝的生产寿命或留场时间。肢蹄问题普遍出现于第1胎母猪[19]。肢蹄评估体系有许多研究报告,且显示遗传力为中等范围:0.01~0.47,而许多特征值的遗传力>0.15[20]。Lopez-Serrano等[21]报道1至2胎留群率与日增重遗传相关系数为-0.28 (大白),-0.06 (长白),1至2胎留群率与背膘遗传相关系数为0.22 (大白),0.24 (长白),结果说明肢蹄评分越高,1~2胎过渡留群更好,肢蹄评分和1至2胎留群率遗传相关系数为0.08(大白),0.19(长白)。此外,已有研究证实肢蹄结构完整即评分好的母猪一生产仔的总量明显更多[22]。因母猪死亡而淘汰的比例为7%~15%。但美国农业部报告认为繁殖母猪群死亡率不应超过3%。根据资料,美国农场母猪死亡率随着群体增大而增加,在250头的1个试验场死亡率为2.5%,在超过500头母猪的农场死亡率增至3.7%,母猪死亡时平均胎次是3.4~4.2[23]。
3. 降低年更新淘汰率
降低年更新淘汰率,在遗传学方面表现为提高母猪利用年限。母猪利用年限是一个复杂的特征, 以非遗传因素影响为主,即不能通过核心群对母猪利用年限进行直接选育,基本无遗传选择反应。研究[7, 11, 14, 18]认为繁殖障碍或不能发情、不能配种成功是母猪淘汰的首要原因,肢蹄问题是年轻母猪淘汰的第二主因。针对这些原因,可以制定相应的措施降低淘汰率。
繁殖障碍一般可通过饲喂管理、体况标准、繁殖知识及现场管理来改变。提高后备母猪的选择标准是施行的主要措施之一,即通过产仔母猪自身的严选来预计性地提高使用年限,相应地降低早期淘汰率。
肢蹄结构的遗传力为中等偏低[24],选择具有最佳形态特征的肢蹄结构的后备母猪是防止淘汰的重点。趾、蹄病变会造成母猪的直接淘汰,母猪的非正常生长会引起淘汰风险[25],而且母猪窝产仔数量比正常母猪更少。选择肢蹄完整良好的结构选育是母猪利用年限指标的间接选育法。
此外,应关注营养。注意后备母猪培育营养、经产母猪体况饲喂及添加剂的使用;及时根据研究进展总结后对母猪进行科学管理;减轻疾病如蓝耳病对使用寿命的不利影响等。
-
![]()
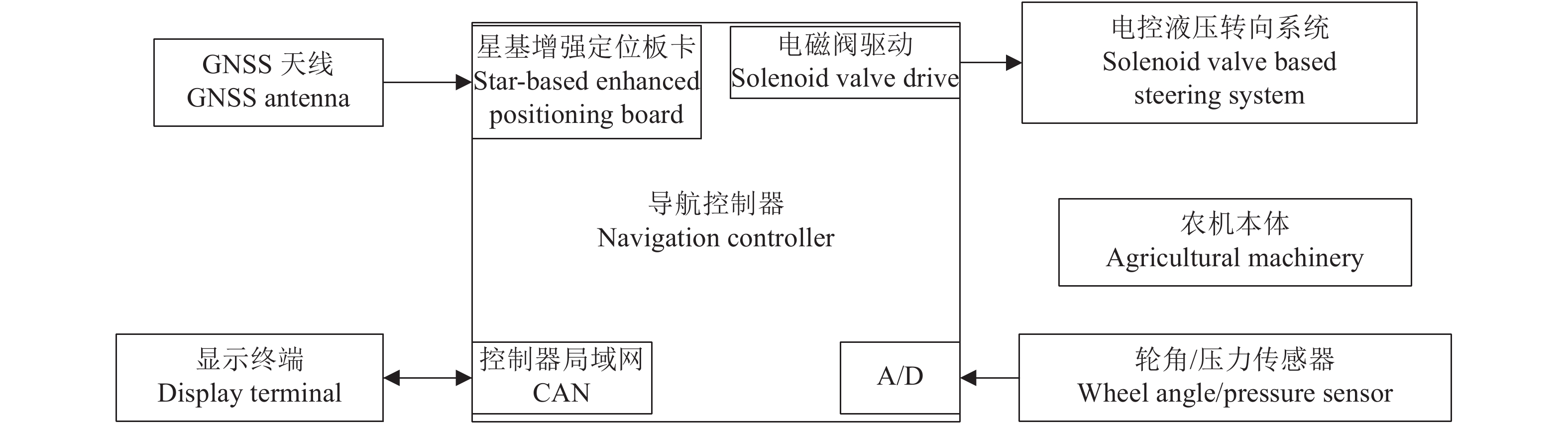
图 1 农机自动导航系统的总体结构示意图
Figure 1. Schematic diagram of the overall structure of the agricultural machinery automatic navigation system
![]()
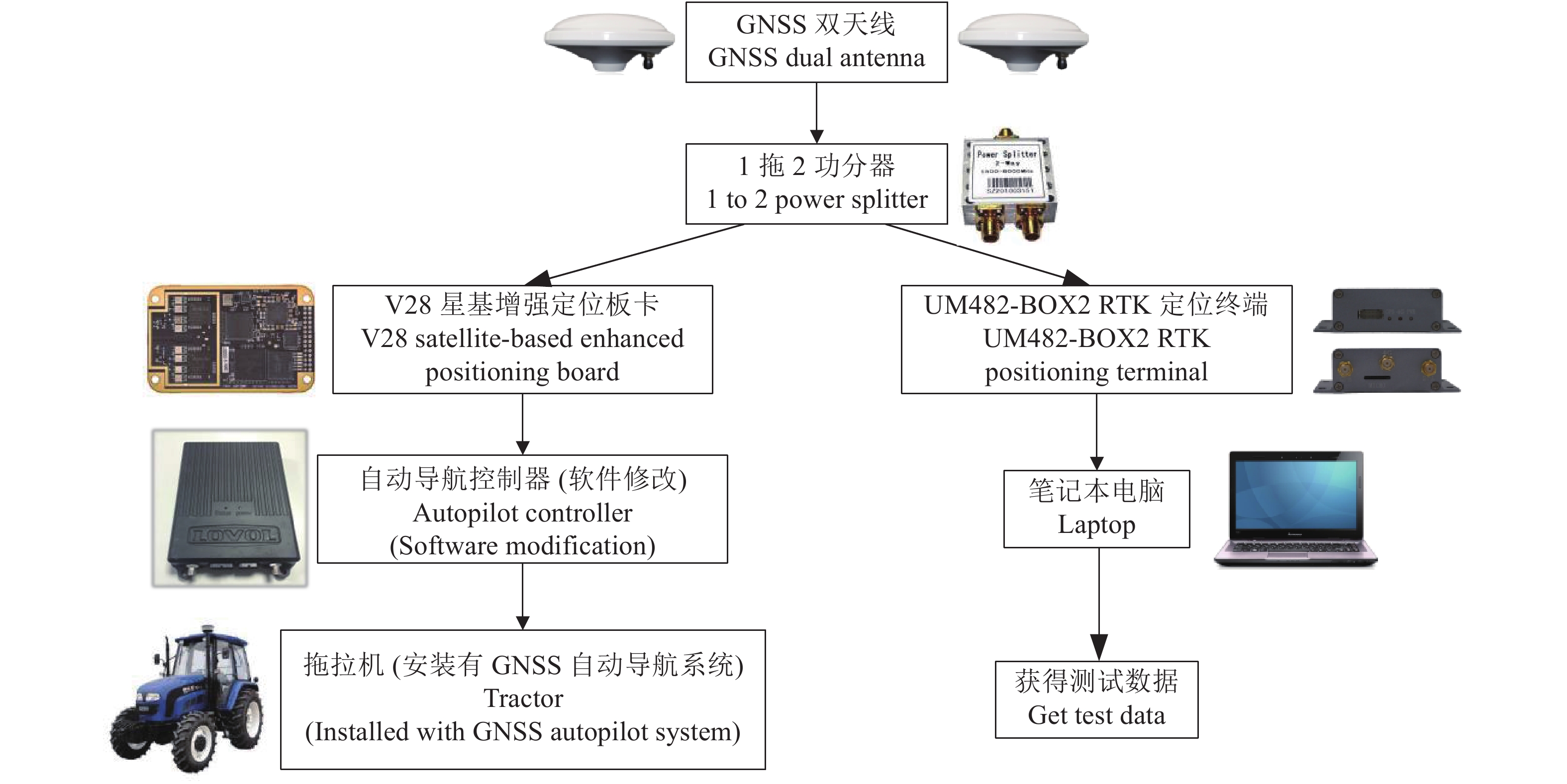
图 3 拖拉机自动导航测试系统结构
Figure 3. Test system structure for satellite-based automatic pilot system of tractor
![]()
图 5 不同速度下自动驾驶系统路径跟踪误差曲线
Figure 5. Path tracking error curve of automatic autopilot system at different speed
表 1 不同速度条件下的路径跟踪控制参数
Table 1 Navigation control parameters under different travelling speeds
速度/
(km·h−1)
Velocity前视距离/m
Foresight
distance比例
Proportional
(P)积分
Integral
(I)微分
Differential
(D)3 1.4 170 13 39 5 2.4 150 10 30 7 3.2 130 8 22  下载: 导出CSV
下载: 导出CSV
表 2 农机星基辅助自动导航系统性能统计表
Table 2 Performance statistics of satellite-based auxiliary agricultural machinery automatic autopilot system
行驶速度/
(km·h−1)
Driving speed直线跟踪误差/m Straight line tracking error 邻接行误差/m Adjacent row error 平均误差
Average
error标准差
Standard
deviation最大误差绝对值
Absolute value of
maximum error平均误差
Average
error标准差
Standard
deviation最大误差绝对值
Absolute value of
maximum error3 −0.0007564 0.01430 0.08867 0.0006187 0.01513 0.11736 5 −0.0009170 0.02374 0.07096 0.0007249 0.02486 0.12254 7 −0.0011575 0.03553 0.09455 0.0007950 0.04960 0.22342 平均值 Average −0.0009436 0.02452 0.08472 0.0007128 0.02986 0.15444
下载: 导出CSV
-
[1] 夏普. 农机自动导航系统精度影响因素分析与试验研究[D]. 泰安: 山东农业大学, 2018. [2] 晓琳, 薄斌, 知谷APP. 合众思壮: 推进精准农业全球化发展[J]. 农业机械, 2019(7): 29-31. [3] 韩树丰, 何勇, 方慧. 农机自动导航及无人驾驶车辆的发展综述(英文)[J]. 浙江大学学报(农业与生命科学版), 2018, 44(4): 381-391. [4] 化祖旭. 自动驾驶汽车路径跟踪控制算法综述[J]. 装备制造技术, 2021(6): 100-103. [5] 张超. BDS/GPS精密单点定位模型与质量控制研究[D]. 淄博: 山东科技大学, 2014. [6] 张胜利. 基于三频模糊度解算的精密单点定位技术研究与实现[D]. 西安: 西安电子科技大学, 2017. [7] 鲍建宽, 陈伟荣, 高成发. 精密单点定位的数学模型选择[J]. 黑龙江工程学院学报(自然科学版), 2013, 27(2): 1-4. [8] 吴紫晗. 北斗导航系统在农机化应用现状浅析[J]. 农机科技推广, 2020(7): 32-34. doi: 10.3969/j.issn.1671-3036.2020.07.016 [9] 朱清山, 高广智, 牛文祥. 农机自动导航驾驶系统及其应用[J]. 现代化农业, 2016(5): 65-67. doi: 10.3969/j.issn.1001-0254.2016.05.037 [10] ZENG P. Research on precise point positioning based on RTKLIB[J]. International Journal of Intelligent Information and Management Science, 2020, 9(6): 275-277.
[11] NIE Z X, WANG B Y, WANG Z J, et al. An offshore real-time precise point positioning technique based on a single set of BeiDou short-message communication devices[J]. Journal of Geodesy:Continuation of Bulletin Géodésique and manuscripta geodaetica, 2020, 94(9): 78.
[12] 陈玉龙. 浅析GPS精密单点定位技术及应用[J]. 科技创新与生产力, 2017(9): 72-73. doi: 10.3969/j.issn.1674-9146.2017.09.072 [13] 张之琛. GPS/BDS实时精密单点定位技术实现[J]. 现代导航, 2020, 11(3): 171-177. doi: 10.3969/j.issn.1674-7976.2020.03.004 [14] 孟范伟. GPS卫星钟差预报与精密钟差估计研究[D]. 青岛: 山东科技大学, 2014. [15] INNAC A, ANGRISANO A, GAGLIONE S, et al. Performance comparison among multi-GNSS single frequency precise point positioning techniques[J]. Cartography and Geoinformation, 2019, 18(32): 80-99.
[16] 范先铮, 帅明明. GPS精密单点定位技术要点及其处理方法研究[J]. 测绘通报, 2020(S1): 305-310. [17] 刘建强. 基于stm32的农机自动驾驶系统的设计与实现[D]. 廊坊: 北华航天工业学院, 2019. [18] 刘兆朋, 张智刚, 罗锡文, 等. 雷沃ZP9500高地隙喷雾机的GNSS自动导航作业系统设计[J]. 农业工程学报, 2018, 34(1): 15-21. doi: 10.11975/j.issn.1002-6819.2018.01.03 [19] 尤文宽. 拖拉机播种作业自动转向控制系统的设计与研究[D]. 石河子: 石河子大学, 2014. [20] 吴林, 施闯, 姜斌. 基于北斗/GNSS星基PPP增强技术的农机自动导航驾驶系统[J]. 农机科技推广, 2019(10): 41-43. doi: 10.3969/j.issn.1671-3036.2019.10.020 [21] 史扬杰, 奚小波, 吴飞, 等. 电机式北斗农机自动导航系统设计与试验[J]. 东北农业大学学报, 2019, 50(4): 88-96. doi: 10.3969/j.issn.1005-9369.2019.04.011 [22] 张智刚, 罗锡文, 胡炼, 等. 4种DGPS模块动态定位精度测试与分析[J]. 华南农业大学学报, 2010, 31(1): 102-107. doi: 10.3969/j.issn.1001-411X.2010.01.025 [23] 王辉, 王桂民, 罗锡文, 等. 基于预瞄追踪模型的农机导航路径跟踪控制方法[J]. 农业工程学报, 2019, 35(4): 11-19. doi: 10.11975/j.issn.1002-6819.2019.04.002 [24] 万豪, 莫中秋, 张宇. 农业机械自动驾驶系统轨迹跟踪误差测试[J]. 无线电工程, 2020, 50(5): 373-376. doi: 10.3969/j.issn.1003-3106.2020.05.007 [25] 刘辉. 农机自动导航系统作业精度评价方法研究与试验验证[D]. 泰安: 山东农业大学, 2017. [26] 张智刚, 朱启明, 何杰, 等. 基于RTK-GNSS和MEMS陀螺仪的车辆航向角测量技术[J]. 华南农业大学学报, 2019, 40(5): 34-37. doi: 10.7671/j.issn.1001-411X.201905085 [27] 张闻宇, 王进, 张智刚, 等. 基于自校准变结构Kalman的农机导航BDS失锁续航方法[J]. 农业机械学报, 2020, 51(3): 18-27. doi: 10.6041/j.issn.1000-1298.2020.03.002