Obstacle avoidance path planning for autonomous navigation agricultural machinery
-
摘要:目的
实现自主导航农业机械作业时静态障碍物避障功能。
方法在已知工作环境条件下提出2种避障路径规划算法。以农机运动规律为基础,依据障碍物位置和尺寸信息提出单障碍物避障算法。在单障碍物避障算法基础上,依据安全行驶区域大小,参考左右双向避障策略提出双/多障碍物避障算法。
结果单障碍物位于不同位置、农机行驶速度为0.3 m·s−1时,行驶路径分别比L算法减少35%、26%,行驶路径累计误差减少53%、82%,方差减少64%、66%;行驶速度为0.5 m·s−1时,行驶路径减少38%、22%,行驶路径累计误差减少66%、62%,方差减少41%、71%。多障碍物路况,农机行驶速度为0.3、0.5 m·s−1时,行驶路径累积误差分别为9.99、4.13 m,方差分别为0.022 1、0.027 0 m2。
结论本文算法在行驶路径、行驶路径累计误差、规划路径跟踪稳定性和路况适应性上均体现出一定优势。
Abstract:ObjectiveTo realize static obstacle avoidance of autonomous navigation agricultural machinery when it operates in the field.
MethodTwo path planning algorithms of obstacle avoidance were proposed under known working environment. The single obstacle avoidance algorithm was proposed based on the movement rule of agricultural machinery and according to the position and the size of the obstacle. On the basis of the single obstacle avoidance algorithm, according to the size of safe driving area, the double/multiple obstacles avoidance algorithm was proposed according to left and right obstacle avoiding strategies.
ResultWhen the single obstacle was located in different locations and the speed of agricultural machinery was 0.3 m·s−1, compared with L algorithm, driving path reduced by 35%, 26%; Accumulative error of driving path reduced by 53%, 82%; Variance reduced by 64%, 66%. When the driving speed was 0.5 m·s−1, driving path reduced by 38%, 22%; Accumulative error reduced by 66%, 26%; Variance reduced by 41%, 71%. When the speed of agricultural machinery was 0.3 and 0.5 m·s−1 under the condition of multiple obstacles, accumulative tracking errors of driving path was 9.99, 4.13 m, and variances were 0.022 1, 0.027 0 m2, respectively.
ConclusionThe proposed algorithm has some advantages in driving path, accumulative error of driving path, stability of theoretical path tracking and adaptability to road condition.
-
首先,确定母猪具有高产的遗传品质,后备母猪培育与管理到位。这2点是决定猪场PSY的启动基础;其次,合理的胎龄结构,即第2至第5胎(或至6、7胎)的母猪数量比例是另一个关键因素。简而言之,具有高产遗传品质的后备母猪,及1、2胎产仔好是必要条件[1];顺利过渡到3~5胎为主结构的高产母猪群[2-3]是充分条件;后者成为主因时,合理的母猪群体更新率成为非常关键的因素。
选择合适的高产母猪,如丹系、法系和加系母系猪,在管理上严格要求,其中,基于最新高产母猪的正常生产指标应是第1、2胎总产仔数达到30头[4];在后备母猪发育、培育的首配标准上[5],笔者认为,关键点排序如下:
1) 体重:135~170 kg首配,这一点非常重要。一生总产仔数是在135~160 kg首配的最多,经济上也最划算。体重太大,会影响到维持需要及淘汰率、肢蹄问题。体重太小、产仔太多时易造成钙磷流失过度而淘汰。
2) 配种日龄为220~270 d,有研究报道不能超过290 d[6],众多资料表明需让母猪在1岁左右分娩,使用年限才较长;6.5~7.0月龄后,发情期刺激6周内应有90%的后备母猪呈现发情。
3) 背膘为12~18 mm,具体视品系特点而定,体况评分为3.0~3.5。后备母猪背膘控制因品系不同,高产母猪在妊娠期膘情控制应更为严格。
4) 全期日增重(初生至140 kg)为590~850 g。对当代高产母猪而言,生长速度过快过慢都会影响到使用寿命、后备利用率和产仔表现。
5) 维持合适选留率、利用率的流程管控。不是所有母猪都适合留种,各阶段后备猪选育,发情和一生繁殖循环的持续性表现好、使用寿命期长、总产仔数量很重要。在29~31周龄时,母猪选留率能大于60%。
1. 年更新率
年更新率=母猪淘汰率+母猪死亡率,其中后者包括无害化处理和自然或疾病死亡。据报道,在欧洲母猪平均年更新率为43%~52%,平均淘汰胎次为4.3~4.6;法国高产的母猪年更新率是44%[7-9];在美国,母猪的年更新率为54%,包括主动和被动淘汰以及死亡率;平均淘汰胎次为3.3~3.8[10-11]。
美国爱荷华州立大学Ken Stalder教授认为PigCHAMP和Pigtales生产管理软件系统中的更新率分别为60%和53%,淘汰率分别为42%和47%(PigCHAMP全美软件,Pigtales是PIC公司软件);并指出更新率方面,在澳大利亚是63.8%(1992—2002年),巴西2002年为55%(43%淘汰率和5.5%死亡率),加拿大2002年为58%,日本2000年为47.6%。2002 PigCHAMP系统中最好的10%猪场指标为:更新率32.7%、淘汰率22%、死亡率2.8%、淘汰平均胎次在5.5胎。因而,除了高产后备母猪的准备外,合理的胎龄结构、平均淘汰胎次是实现猪场高产的其他关键影响指标。
综合众多研究,建议更新率39%~40%为管理目标的基准,其中淘汰率35%~36%,死亡率3%~5%[12];从理论或经济上来说,胎次不超过8,提供断奶仔猪总数88头是一个管理的基准目标。
2. 淘汰率及原因剖析
能繁母猪是全猪场最有价值的动物即生物资产,据估计40%~50%母猪在第3或4胎之前被淘汰。母猪在分娩1~2胎后被动淘汰时,母猪最大生产能力未得以发挥,替换成本还未得到收回[13-14]。母猪淘汰原因中,约有70%是由于繁殖失败和肢蹄疾病,即被动淘汰是主因[9]。一头母猪在第3胎时才足够抵回/收回成本,当然实际情况因猪场、投资和国家而异[13-15]。高淘汰率增加非生产天数,增加后备母猪数量和引种比例,导致平均窝产仔数、PSY下降[16]。主动淘汰是指数据管理和现场人员决定从能繁母猪群中主动移除母猪的操作流程。原因为达到最大胎次即年老、产仔表现不佳。而被动淘汰是由于繁殖障碍、哺乳问题、肢蹄疾病及死亡。年轻母猪常为被动淘汰之列[17]。美国爱荷华州立大学Ken Stalder教授早期讲课资料中[18],分析过淘汰原因占比,其中繁殖障碍30%~35%;胎龄老化15%~20%;繁殖表现差15%~20%,肢蹄问题10%~15%,死亡5%~10%,产后瘫痪或产后继发问题3%~5%,其他占5%。从结果可看出,主动淘汰即2、3项之和也可占30%~40%,可以成为管理的目标。
在河南农业大学李新建博士等[19]翻译的《妊娠和哺乳母猪》基础上,笔者进行了主动淘汰及被动淘汰的分类。主动淘汰主要为胎龄过老、产仔差等;被动淘汰为繁殖障碍、母猪的肢蹄问题以及母猪死亡等。
因胎龄过老而主动更新的淘汰占比约为9%~31%。产仔差包括窝产仔数少,出生重过轻,断奶不行,乳房和母猪质量不行,母猪因产仔差而淘汰的平均占比为20%~30%,文献记录范围为11%~56%。发情、受胎和分娩即空怀、难产等繁殖障碍是常见的被动淘汰原因,占淘汰数量比约为20%~43%;其中,有34%~43%是胎龄较低的年轻繁殖母猪,与其他动物相比,非生产日龄延长更多。据报道,在母猪群体中有6%~40%(平均10%)的移除淘汰是由于肢蹄问题。据统计,跛行后备母猪产仔数更少,平均利用年限短。研究发现,7%的跛行后备母猪未完成第1胎分娩;13%的跛行后备母猪在第2胎前淘汰;只有约50%的跛行后备母猪生产达到了第4胎。因跛行、肢蹄问题的母猪平均只能达2.93窝的生产寿命或留场时间。肢蹄问题普遍出现于第1胎母猪[19]。肢蹄评估体系有许多研究报告,且显示遗传力为中等范围:0.01~0.47,而许多特征值的遗传力>0.15[20]。Lopez-Serrano等[21]报道1至2胎留群率与日增重遗传相关系数为-0.28 (大白),-0.06 (长白),1至2胎留群率与背膘遗传相关系数为0.22 (大白),0.24 (长白),结果说明肢蹄评分越高,1~2胎过渡留群更好,肢蹄评分和1至2胎留群率遗传相关系数为0.08(大白),0.19(长白)。此外,已有研究证实肢蹄结构完整即评分好的母猪一生产仔的总量明显更多[22]。因母猪死亡而淘汰的比例为7%~15%。但美国农业部报告认为繁殖母猪群死亡率不应超过3%。根据资料,美国农场母猪死亡率随着群体增大而增加,在250头的1个试验场死亡率为2.5%,在超过500头母猪的农场死亡率增至3.7%,母猪死亡时平均胎次是3.4~4.2[23]。
3. 降低年更新淘汰率
降低年更新淘汰率,在遗传学方面表现为提高母猪利用年限。母猪利用年限是一个复杂的特征, 以非遗传因素影响为主,即不能通过核心群对母猪利用年限进行直接选育,基本无遗传选择反应。研究[7, 11, 14, 18]认为繁殖障碍或不能发情、不能配种成功是母猪淘汰的首要原因,肢蹄问题是年轻母猪淘汰的第二主因。针对这些原因,可以制定相应的措施降低淘汰率。
繁殖障碍一般可通过饲喂管理、体况标准、繁殖知识及现场管理来改变。提高后备母猪的选择标准是施行的主要措施之一,即通过产仔母猪自身的严选来预计性地提高使用年限,相应地降低早期淘汰率。
肢蹄结构的遗传力为中等偏低[24],选择具有最佳形态特征的肢蹄结构的后备母猪是防止淘汰的重点。趾、蹄病变会造成母猪的直接淘汰,母猪的非正常生长会引起淘汰风险[25],而且母猪窝产仔数量比正常母猪更少。选择肢蹄完整良好的结构选育是母猪利用年限指标的间接选育法。
此外,应关注营养。注意后备母猪培育营养、经产母猪体况饲喂及添加剂的使用;及时根据研究进展总结后对母猪进行科学管理;减轻疾病如蓝耳病对使用寿命的不利影响等。
-
![]()
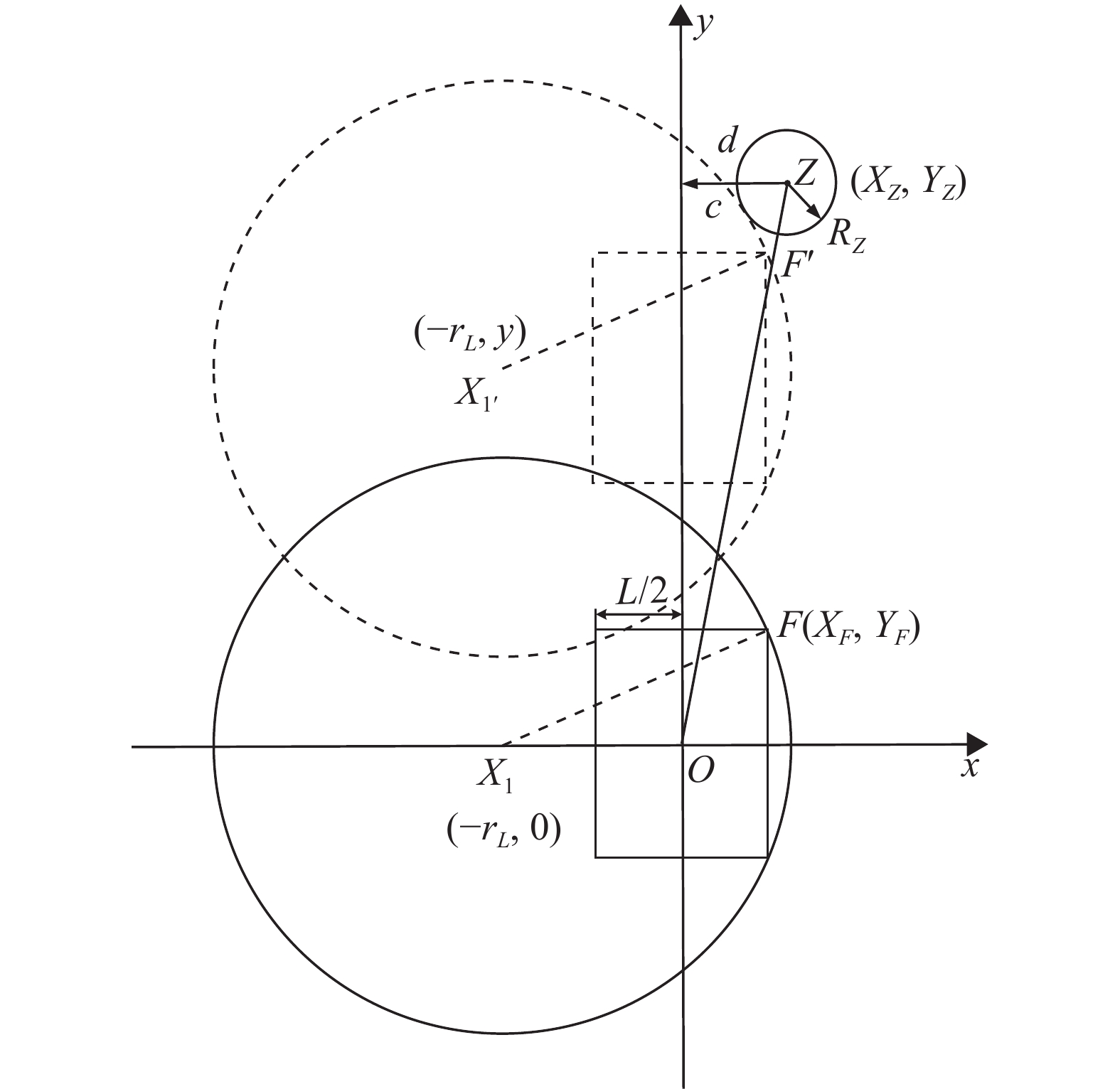
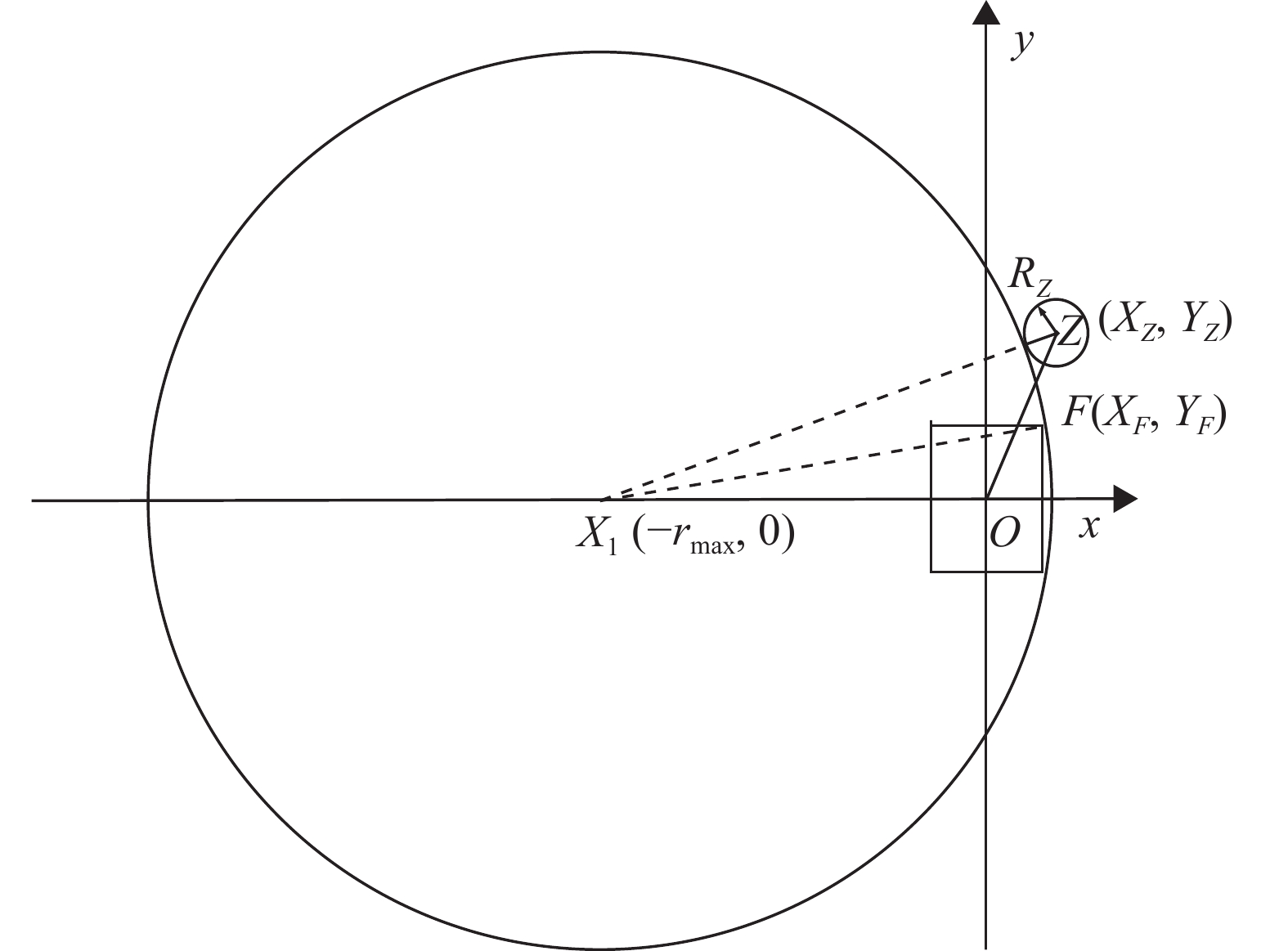
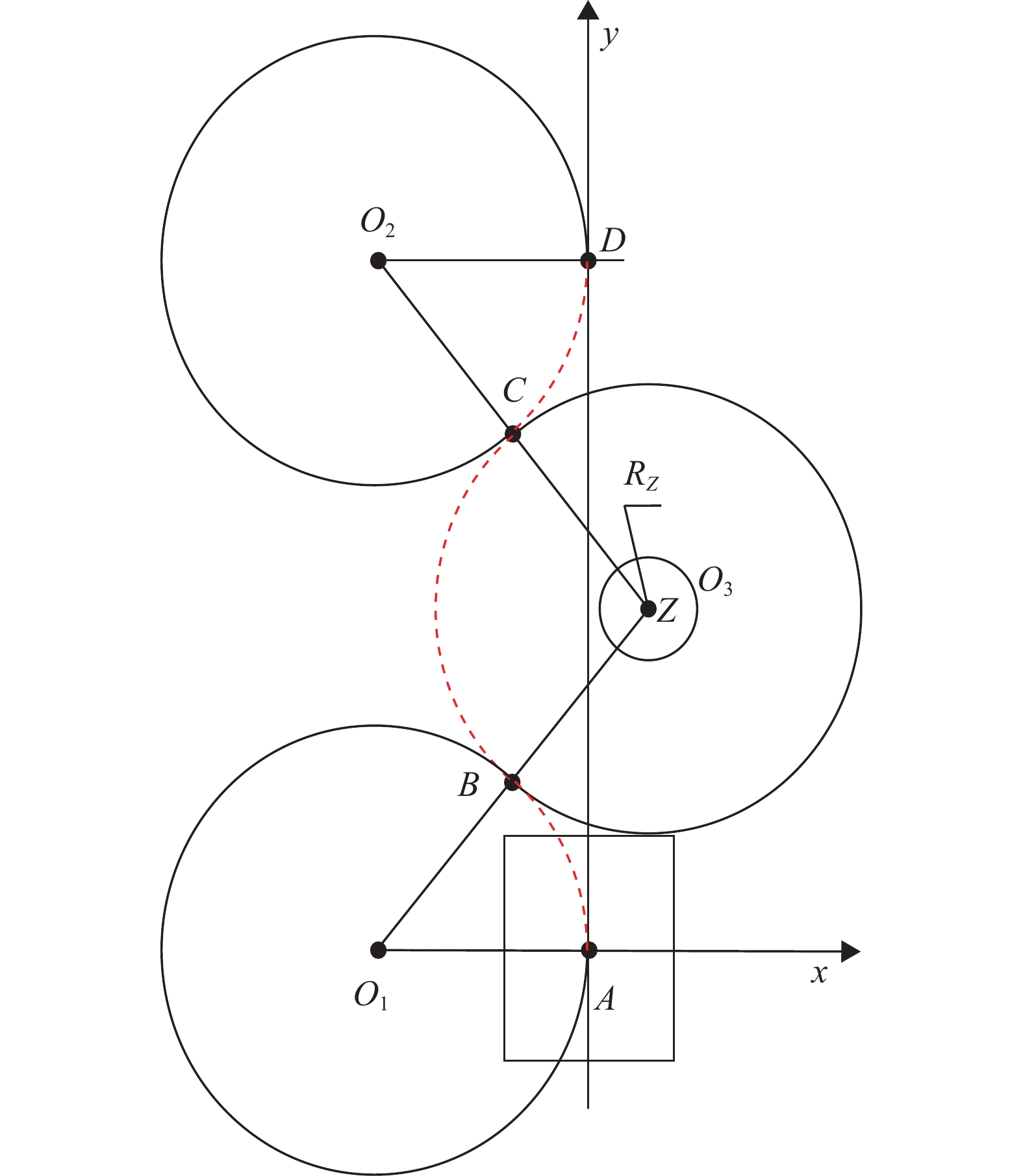
图 2 确定避障最大转弯半径
Figure 2. Determination of the maximum turning radius of obstacle avoidance
![]()
图 7 单障碍物和不同行驶速度条件下L算法避障试验
Figure 7. Obstacle avoidance experiments of L algorithm at single obstacle and different driving speeds conditions
![]()
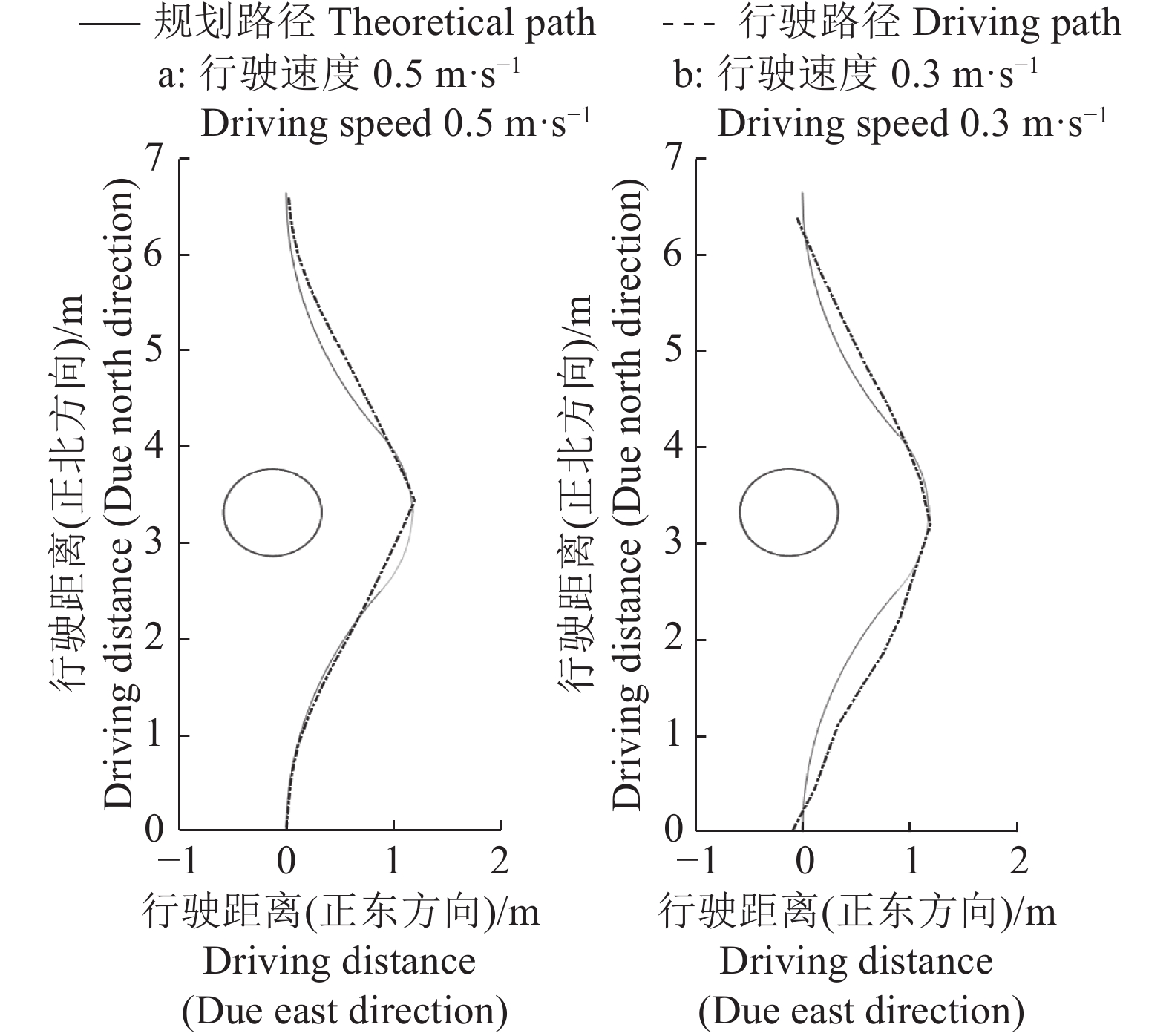
图 8 单障碍物和不同行驶速度条件下单障碍物避障算法避障试验
Figure 8. Obstacle avoidance experiments of single obstacle avoidance algorithm at single obstacle and different driving speeds conditions
![]()
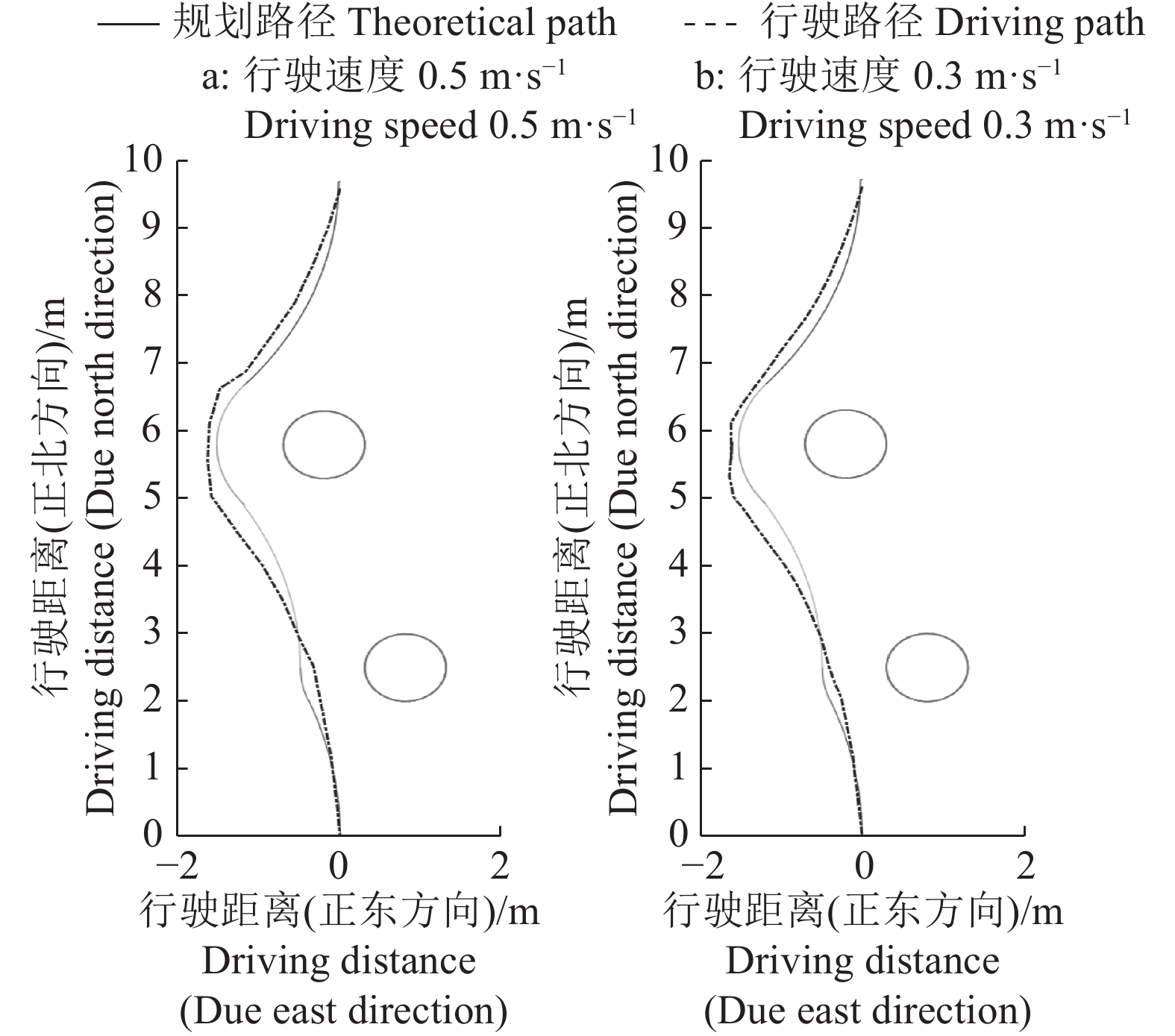
图 9 双障碍物和不同行驶速度条件下双/多障碍物避障算法避障试验
Figure 9. Obstacle avoidance experiments of double/multiple obstacles avoidance algorithm at double obstacles and different driving speeds conditions
![]()
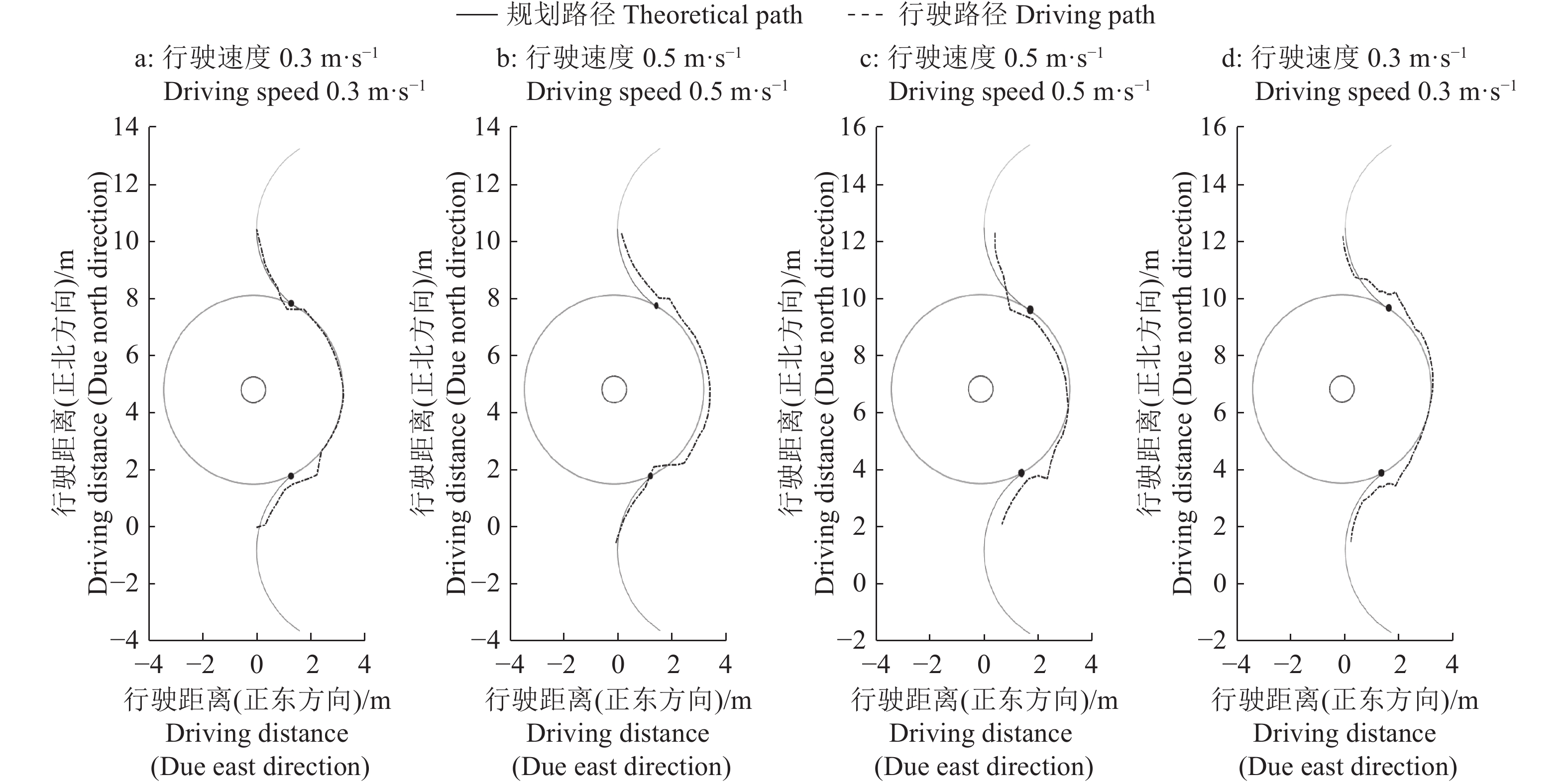
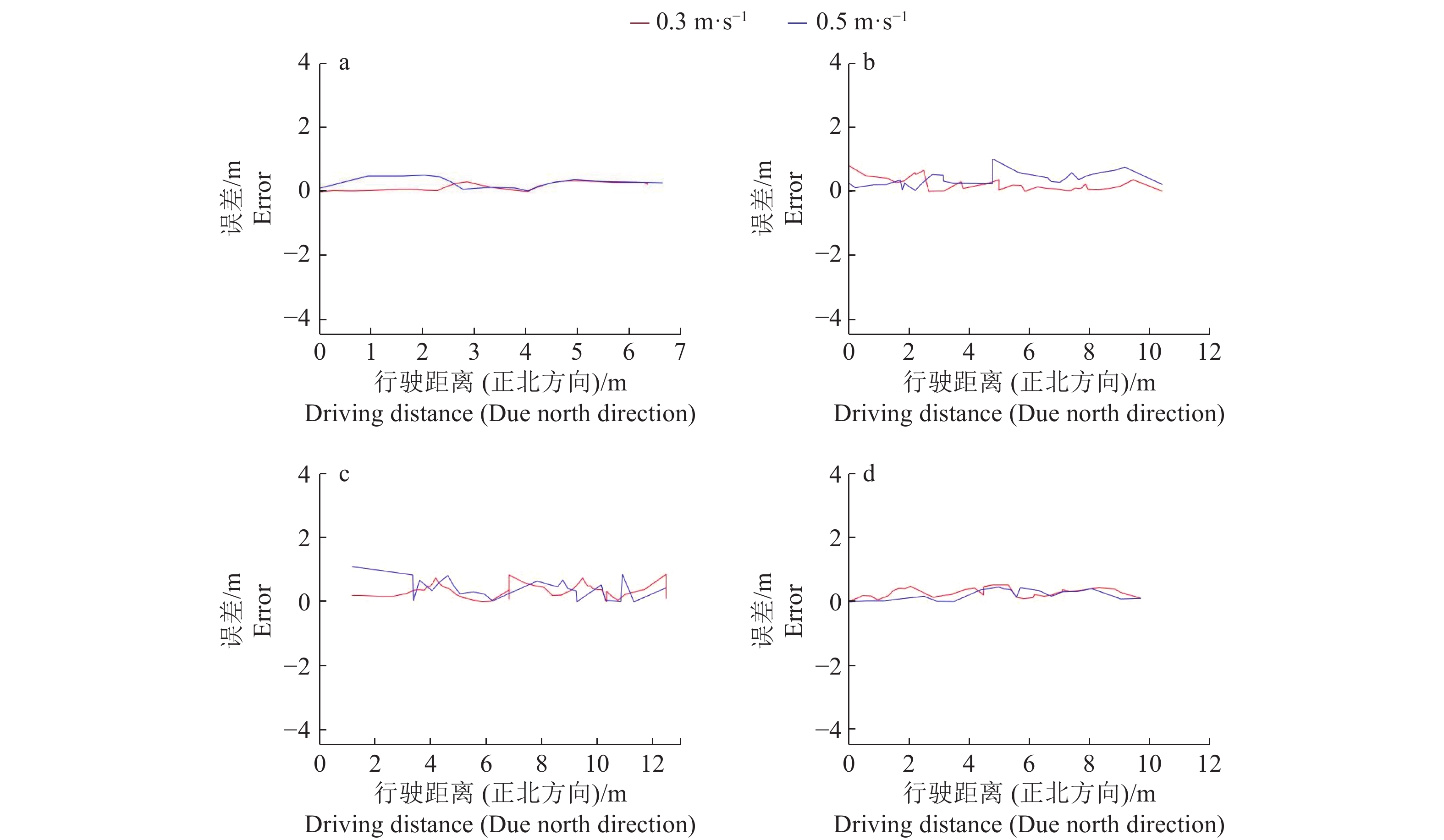
图 10 不同障碍物条件下以不同行驶速度跟踪不同算法避障路径时行驶路径与规划路径的误差
a:单障碍物避障算法,障碍物位置为(−0.125,4.820)、(−0.125,6.820);b:L算法,障碍物位置为(−0.125,4.820);c:L算法,障碍物位置为(−0.125,6.820);d:双/多障碍物算法,2个障碍物位置为(−0.200,5.800)、(0.800,2.500)
Figure 10. Errors between driving path and theoretical path caused by tracking obstacle avoidance paths of different algrithms at the different obstacle conditions and driving speeds
a: Single obstacle avoidance algorithm, the locations of the obstacle were (−0.125, 4.820) and (−0.125, 6.820); b: L algorithm, the location of the obstacle was (−0.125, 4.820); c: L algorithm, the location of the obstacle was (−0.125, 6.820); d: Double/multiple obstacles avoidance algorithm, the locations of two obstacles were (−0.200, 5.800) and (0.800, 2.500)
表 1 单障碍物和不同行驶速度条件下单障碍物避障算法与L算法对比
Table 1 Contrast of single obstacle avoidance algorithm and L algorithm at single obstacle and different driving speeds conditoins
障碍物
位置
Obstacle location行驶速度/
(m·s−1)
Driving speed行驶路径/m
Driving path规划路径/m
Theoretical path累积误差/m
Accumulative error方差/m2
VarianceSOAA L SOAA L SOAA L SOAA L (−0.125, 4.820) 0.3 8.55 13.15 9.17 13.49 3.57 7.76 0.015 0 0.042 6 0.5 8.38 13.62 9.17 13.49 4.07 12.11 0.027 3 0.046 3 (−0.125, 6.820) 0.3 10.55 14.28 11.17 15.23 3.57 20.55 0.015 0 0.044 3 0.5 10.38 13.36 11.17 15.23 4.07 10.77 0.027 3 0.095 2 1) SOAA:单障碍物避障算法; L:L算法
1) SOAA: Single obstacle avoidance algorithm; L: L algorithm 下载: 导出CSV
下载: 导出CSV
表 2 双/多障碍物避障算法试验数据分析
Table 2 Data analyses of double/multiple obstacles avoidance algorithm experiments at double obstacles and different driving speeds conditions
行驶速度/(m·s−1)
Driving speed行驶路径/m
Driving path规划路径/m
Theoretical path累积误差/m
Accumulative error方差/m2
Variance0.3 10.30 10.29 9.99 0.022 1 0.5 10.36 10.29 4.13 0.027 0
下载: 导出CSV
-
[1] 姬长英, 周俊. 农业机械导航技术发展分析[J]. 农业机械学报, 2014, 45(9): 44-54. doi: 10.6041/j.issn.1000-1298.2014.09.008 [2] GAN-MOR S, CLARK R L, UPCHURCH B L. Implement lateral position accuracy under RTK-GPS tractor guidance[J]. Comput Electron Agric, 2007, 59(1/2): 31-38.
[3] TIMO O, JUHA B. Guidance system for agricultural tractor with four wheel steering[J]. IFAC Proceed Vol, 2013, 46(4): 124-129. doi: 10.3182/20130327-3-JP-3017.00030
[4] KARIMI D, HENRY J, MANN D D. Effect of using GPS autosteer guidance systems on the eye-glance behavior and posture of tractor operators[J]. J Agric Saf Health, 2012, 18(4): 309-318. doi: 10.13031/2013.42332
[5] 刘柯楠, 吴普特, 朱德兰, 等. 太阳能渠道式喷灌机自主导航研究[J]. 农业机械学报, 2016, 47(9): 141-146. doi: 10.6041/j.issn.1000-1298.2016.09.021 [6] CORDESSES L, CARIOU C, BERDUCAT M. Combine harvester control using real time kinematic GPS[J]. Precis Agric, 2000, 2(2): 147-161. doi: 10.1023/A:1011473630247
[7] CHOI J, YIN X, YANG L, et al. Development of a laser scanner-based navigation system for a combine harvester[J]. E A Environment F, 2014, 7(1): 7-13. doi: 10.1016/j.eaef.2013.12.002
[8] 张美娜, 吕晓兰, 陶建平, 等. 农用车辆自主导航控制系统设计与试验[J]. 农业机械学报, 2016, 47(7): 42-47. doi: 10.6041/j.issn.1000-1298.2016.07.007 [9] 张漫, 项明, 魏爽, 等. 玉米中耕除草复合导航系统设计与试验[J]. 农业机械学报, 2015, 46(S1): 8-14. doi: 10.6041/j.issn.1000-1298.2015.S0.002 [10] 谢斌, 李静静, 鲁倩倩, 等. 联合收割机制动系统虚拟样机仿真及试验[J]. 农业工程学报, 2014, 30(4): 18-24. doi: 10.3969/j.issn.1002-6819.2014.04.003 [11] 任述光, 谢方平, 王修善, 等. 4LZ-0.8型水稻联合收割机清选装置气固两相分离作业机理[J]. 农业工程学报, 2015, 31(12): 16-22. doi: 10.11975/j.issn.1002-6819.2015.12.003 [12] 焦有宙, 田超超, 贺超, 等. 不同工质对大型联合收割机余热回收的热力学性能[J]. 农业工程学报, 2018, 34(5): 32-38. doi: 10.11975/j.issn.1002-6819.2018.05.005 [13] 伟利国, 张小超, 汪凤珠, 等. 联合收割机稻麦收获边界激光在线识别系统设计与试验[J]. 农业工程学报, 2017, 33(S1): 30-35. [14] 刘刚, 李笑, 康熙, 等. 基于GNSS的农田平整自动导航路径规划方法[J]. 农业机械学报, 2016, 47(S1): 21-29. [15] 孟志军, 刘卉, 王华, 等. 农田作业机械路径优化方法[J]. 农业机械学报, 2012, 43(6): 147-152. doi: 10.6041/j.issn.1000-1298.2012.06.027 [16] TAÏX M, SOUÈRES P, FRAYSSINET H, et al. Path planning for complete coverage with agricultural machines[M]//Springer-verlag Berlin. Springer tracts in advanced robotics. Berlin: Springer-verlag, 2006.
[17] KANG N K, SON H J, LEE S H. Modified A-star algorithm for modular plant land transportation[J]. J Mech Sci Technol, 2018, 32(12): 5563-5571. doi: 10.1007/s12206-018-1102-z
[18] LE A V, PRABAKARANV, SIVANANTHAMV, et al. Modified A-star algorithm for efficient coverage path planning in tetris inspired self-reconfigurable robot with integrated laser sensor[J]. Sensors, 2018, 18(8). doi: 10.3390/s18082585.
[19] 吴麟麟, 杨俊辉, 汪若尘, 等. 基于混合SA算法的智能汽车全局路径规划[J]. 江苏大学学报(自然科学版), 2019, 40(3): 249-254. [20] 刘建华, 杨建国, 刘华平, 等. 基于势场蚁群算法的移动机器人全局路径规划方法[J]. 农业机械学报, 2015, 46(9): 18-27. doi: 10.6041/j.issn.1000-1298.2015.09.003 [21] 陈余庆, 李桐训, 于双, 等. 基于势场蚁群算法的机器人全局路径规划[J]. 大连理工大学学报, 2019, 59(3): 316-322. doi: 10.7511/dllgxb201903014 [22] 谢永良, 尹建军, 余承超, 等. 轮式AGV沿葡萄园垄道行驶避障导航算法与模拟试验[J]. 农业机械学报, 2018, 49(7): 13-22. doi: 10.6041/j.issn.1000-1298.2018.07.002 [23] 殷建军, 董文龙, 梁利华, 等. 复杂环境下农业机器人路径规划优化方法[J]. 农业机械学报, 2019, 50(5): 17-22. doi: 10.6041/j.issn.1000-1298.2019.05.002 [24] TIAN L F, COLLINS C. An effective robot trajectory planning method using a genetic algorithm[J]. Mechatronics, 2003, 14(5): 455-470.
[25] KIM H, KIM B K. Online minimum-energy trajectory planning and control on a straight-line path for three-wheeled omnidirectional mobile robots[J]. IEEE T Ind Electron, 2014, 61(9): 4771-4779. doi: 10.1109/TIE.2013.2293706
[26] GREGORY J, OLIVARES A, STAFFETTI E. Energy-optimal trajectory planning for robot manipulators with holonomic constraints[J]. Syst Control Lett, 2012, 61(2): 279-291. doi: 10.1016/j.sysconle.2011.11.005
[27] LIU C, ZHAO X, DU Y. Research on the static path planning method of small obstacles for automatic navigation of agricultural machinery[C]. IFAC-Papers. Beijing. 2018: 673-677.