
Application of genetic algorithm based on group and elite strategy for robot navigation
-
摘要:目的
针对种植园复杂环境下采摘机器人进行路径规划时找出多路径效率低、速度慢等问题,提出一种基于分组和精英策略的遗传算法(GGABE)。
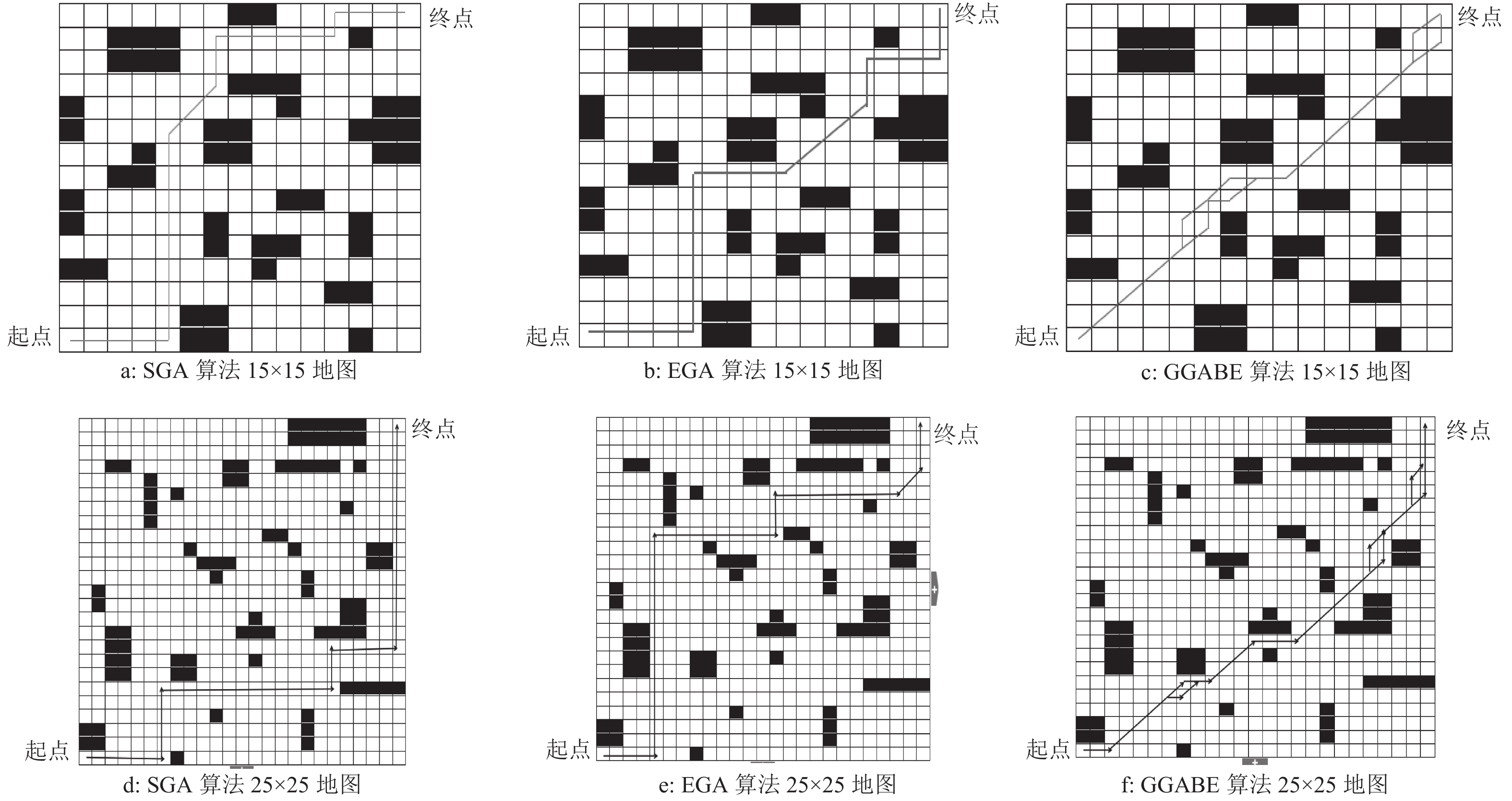
方法首先生成1个初始群体,使用Sigmoid函数分组;然后在每组中分别进行选择、交叉、变异操作,进行n代迭代后,每组产生该组内的k条等长的最优路径;比较各组最优路径,选择最短的路径作为最优路径。在种群的各项参数均相同的情况下,简单遗传算法(SGA)、未分组的精英遗传算法(EGA)以及GGABE分别作用于15×15和25×25的地图,各进行 50 次试验。进行样机验证试验。
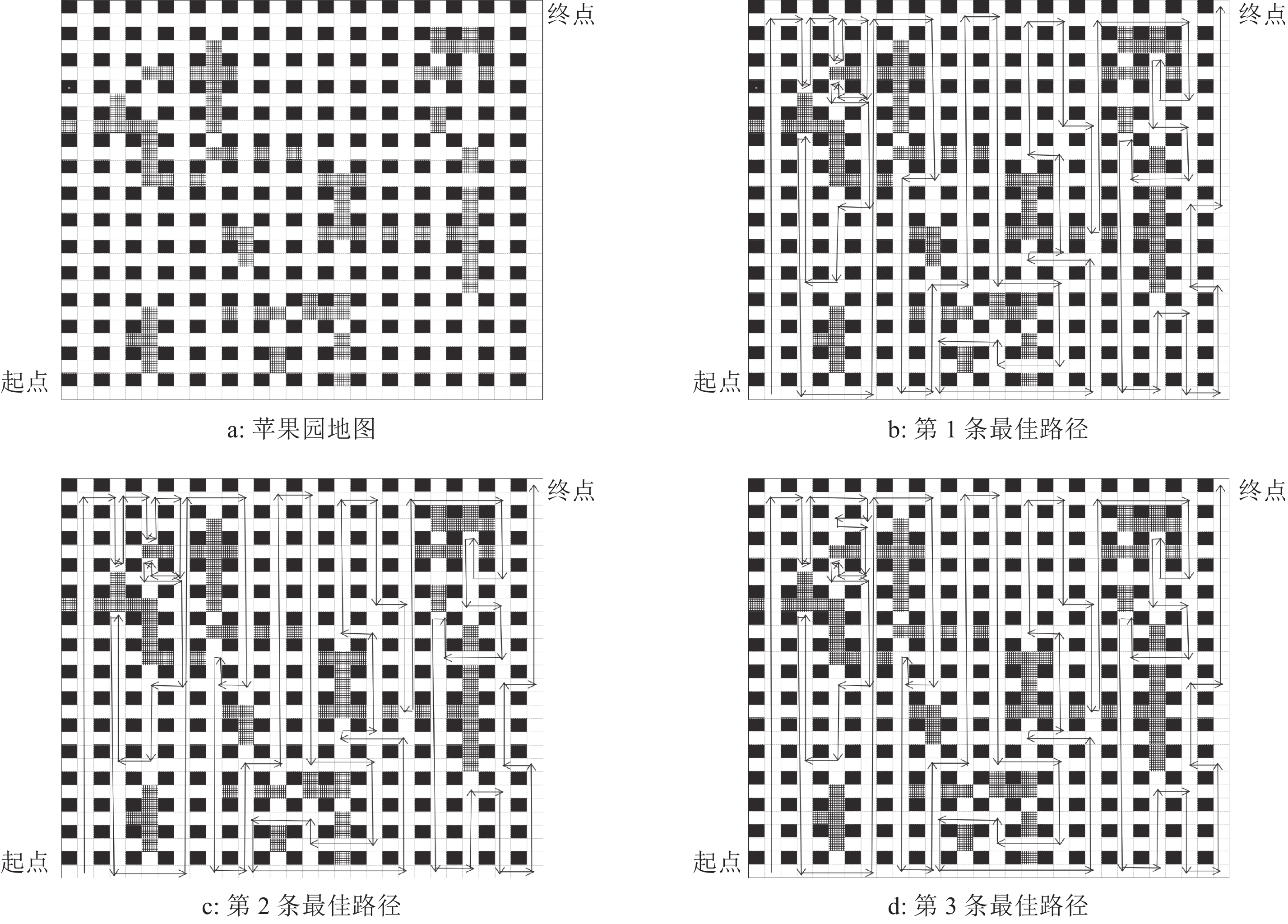
结果第 1 幅地图,GGABE算法找到了 8 条最短路径,路径均值为 20.970 6,其他 2 种方法只能找出 1 条最短路径;第 2 幅地图,GGABE算法找到了 8 条最短路径,路径均值为 38.041 6。50次验证试验均找出 3 条最佳路径,平均路径规划时间为 15.543 319 s。
结论本研究提出的基于分组和精英策略的遗传算法收敛速度快,可快速准确地在地图中搜索出所有能够遍历整个果园的最佳路径。
Abstract:ObjectiveTo solve the problems that picking robot could not find the multipath quickly and accurately in planning route in complex plantation environment, a genetic algorithm based on group and elite strategy (GGABE) was proposed.
MethodFirstly, an initial population was generated and was divided into several groups using the Sigmoid function. After n times of operations of selections, crossovers and mutations in each group separately, k optimal paths with equal length were then acquired in each group. Comparing the optimal paths among different groups, the shortest paths were chosen as the final optimal paths. With all population parameters being the same, three types of algorithms, including simple genetic algorithm(SGA), ungrouped elite genetic algorithm (EGA) and GGABE, were tested 50 times respectively on 15×15 and 25×25 maps. The prototype verification experiments were carried out in the plantation.
ResultEight shortest paths with the average length of 20.970 6 were found in map 1 by GGABE. Only one shortest path was found in map 1 with the other two algorithms. Eight shortest paths with the average length of 38.041 6 were found in map 2 by GGABE. Three optimal paths were found in each of the 50 verification experiments, and the average consumption time for route planning was 15.543 319 s.
ConclusionGGABE has fast convergence speed and can quickly and accurately find out all optimal paths, which are able to traverse the entire plantation, from the map.
-
Keywords:
- group /
- elite strategy /
- picking robot /
- genetic algorithm /
- advantageous individual /
- route planning /
- navigation
-
甘蔗梢腐病(Pokkah boeng)是用爪哇术语命名的一种真菌性气传病害,主要是由镰刀菌Gibberella fujikuroi引起的[1],无性阶段为腾仓镰刀菌复合种(Fusarium fujikuroi complex),属半知菌亚门。在甘蔗叶片病害中,梢腐病逐渐上升为主要病害之一[2]。据2012—2014年广西甘蔗品种区域试验以及2013—2014年国家甘蔗品种区域试验调查,品种发病率达到100%。此病害导致甘蔗减产5%~20%,甘蔗糖分降低达3%[3]。因此,完善甘蔗梢腐病田间病症分级标准,建立梢腐病田间抗性评价体系,筛选高抗种质资源迫在眉睫。甘蔗梢腐病由多种致病镰刀菌引起,产生多种不同的症状。感染梢腐病的甘蔗叶片主要表现出皱缩阶梯状、萎蔫扭曲、生长受阻、生长点劣变坏死、蔗梢腐烂干枯等病症。20世纪90年代广西甘蔗研究所建立了甘蔗梢腐病田间5级法分级标准[4],但未能对甘蔗抗性水平作出分级评价。张玉娟[5]对不同甘蔗种质资源和杂交组合进行初步的分级标准探讨,但由于甘蔗生长受品种、栽培方式以及生态环境等多重因素影响,其以感病率作为聚类分析依据,对于客观评价甘蔗品种抗病性的指导性不强。国外同行在2013年对甘蔗梢腐病进行了症状分类和病原检测[6]。广西甘蔗产业协同中心从2013年至今持续开展甘蔗梢腐病室内接种筛选和田间接种调查工作,整理和记录了各类发病症状,这为我们开展抗性评价和流行性趋势研究工作打下了坚实基础。本研究以广西主栽品种ROC22和11个甘蔗品系为试验材料,于梢腐病盛发期调查新植蔗、宿根蔗感病情况,探讨甘蔗新品种(系)抗病性差异和广西甘蔗梢腐病区域性发生特点,进而对参试材料开展病理学分析,逐步完善甘蔗梢腐病田间分级标准;全面评价各参试品种(系)的抗病性,深入分析甘蔗梢腐病区域性差异机理,为筛选抗梢腐病甘蔗种质资源提供标准以及为甘蔗新品种(系)因地制宜推广提供科学支持。
1. 材料与方法
1.1 试验材料
调查2014—2015年度广西甘蔗品种区域试验12个品种(系)的新植和宿根蔗,以ROC22为对照材料,详情见表 1。
表 1 参试甘蔗品种(系)信息Table 1. The information of tested sugarcane varieties (lines)
1.2 试验设计
承试单位和试验点共6个,分别为:广西农业科学院甘蔗研究所(南宁)、柳州市农业科学研究所(柳州沙塘)、河池市农业科学研究所(河池宜州)、百色市农业科学研究所(百色田阳)、北海市农业科学研究所(北海平阳)、广西南亚热带农业科学研究所(崇左龙州)。试验于2014—2015年进行,包括1年新植和1年宿根蔗。采取随机区组设计,3次重复,4~5行区,行长7~10 m,行距1.0~1.2 m,小区面积33.5~50.0 m2。宿根蔗下种期为2014年3—4月,于2015年2月收获。新植蔗下种期为2015年的3—4月,于2015年6月下旬—7月上旬调查各区试点甘蔗梢腐病发病情况。
1.3 调查方法
每小区调查中间2行,调查每株甘蔗的所有叶片,用目测法评估叶片和蔗茎的发病程度。记录调查的总株数、病株数及病级。病害等级标准参照刘梦林等[4]的划分方法,并作修改。分级标准见表 2。
表 2 甘蔗梢腐病田间调查分级标准Table 2. The grading standard of sugarcane pokkah boeng disease severity in the field
1.4 数据统计
发病率和病情指数(Disease severity index, DSI)参照沈万宽等[7]、李朝生等[8]方法进行。
1.5 抗性评价
应用Excel 2010和DPS 7.05分析软件对新植和宿根甘蔗进行梢腐病抗性评价(方差分析采用Duncan’s新复极差法),当新植和宿根所确定的抗性等级不一致时,以抗性较差者的等级作为该品种(系)的抗性等级。基于此次研究数据、历年甘蔗梢腐病生产实际以及前人研究结果建立田间抗性评价标准(表 3)。对分级数据先进行标准化转换,采用χ2距离和离差平方和的方法进行系统聚类。
表 3 甘蔗梢腐病田间抗性评价标准Table 3. The grading standard of sugarcane resistance to pokkah boeng disease in the field
2. 结果与分析
2.1 新植蔗和宿根蔗梢腐病发生情况
全区新植蔗梢腐病发病率为0.16%~23.82%,病情指数为0.03~16.48。桂糖06-400在河池、崇左2个试验点发病率和病情指数都最高;桂糖06-1023在柳州试验点发病率和病情指数均为最高;ROC22在南宁试验点发病率最低,病情指数也相应偏低;桂辐06-156在百色试验点发病率最低,病情指数也偏低。其中,桂糖05-3846的发病率和病情指数在6个试验点都偏低。宿根蔗梢腐病发病率为0~25.89%,病情指数为0~17.37。桂南亚08-186感梢腐病比较严重,尤其是在柳州试验点;桂糖06-1023在南宁、柳州、北海、百色、崇左5个试验点病情指数均较高,桂辐06-156、桂糖05-3846在各试验点都表现出抗梢腐病的优良特性。
试验点新植蔗病情指数排序为柳州>崇左>北海>百色>河池>南宁,宿根蔗试验点病情指数排序为河池>崇左>北海>百色>柳州>南宁,综合新植蔗和宿根蔗的平均值排序为崇左>柳州>河池>北海>百色>南宁(图 1A)。其中柳州、崇左2个试验点宿根蔗的病情指数低于新植蔗,其他试验点均表现为宿根蔗较新植蔗严重,其中以河池蔗区宿根蔗发病较为严重,表明崇左、柳州和河池3个试验点属于梢腐病高发区,百色、南宁2个试验点属于低发区(图 1A)。综合全区新植蔗梢腐病平均病情指数达到17.40,宿根蔗达到19.35,相较增长了11.21%,表明宿根蔗梢腐病的发生程度较新植蔗严重,试验区的梢腐病发病总体水平比较高。
![]() 图 1 广西蔗区甘蔗梢腐病发生情况病情指数以新植蔗、宿根蔗平均值计; A:蔗区病情指数累积;B:品种(系)病情指数累积Figure 1. The occurrence of sugarcane pokkah boeng disease in Guangxi
图 1 广西蔗区甘蔗梢腐病发生情况病情指数以新植蔗、宿根蔗平均值计; A:蔗区病情指数累积;B:品种(系)病情指数累积Figure 1. The occurrence of sugarcane pokkah boeng disease in Guangxi根据一年新植蔗和一年宿根蔗梢腐病调查结果,对甘蔗品种(系)病情指数进行累积分析,结果显示,桂糖06-1023梢腐病发生最严重,其次为桂糖06-400和桂南亚08-186,桂辐06-156最轻(图 1B)。
2.2 参试品种(系)梢腐病抗性评价
病情指数划分的抗性等级和水平见表 4,调查的12个品种中抗病品种(系)4个,桂辐06-156、桂糖05-3846、桂选B9、ROC22;中抗品种(系)4个,桂糖06-233、桂糖07-1141、桂糖07-494和桂糖03-3089;中感品种(系)2个,桂热1号和桂南亚08-186;感病品种(系)2个,桂糖06-1023、桂糖06-400。大部分品种(系)的新植蔗和宿根蔗对梢腐病的抗性表现一致,但桂糖06-400、桂热1号和桂糖06-1023宿根蔗的发生情况较新植蔗稍重。以病情指数为对象进行系统聚类分析(分级数据先进行标准化转换,采用χ2距离和离差平方和的方法进行聚类),不同抗性甘蔗品种(系)病情指数的聚类也与累积分析及划分的抗性水平的结果一致(图 2)。
表 4 参试品种(系)梢腐病抗性评价1)Table 4. The resistance evaluation of tested varieties (lines) to sugarcane pokkah boeng disease
![]() 图 2 甘蔗品种(系)对梢腐病田间抗性的聚类分析图Figure 2. Clustering of sugarcane varieties (lines) based on disease severity index(DSI) in the field
图 2 甘蔗品种(系)对梢腐病田间抗性的聚类分析图Figure 2. Clustering of sugarcane varieties (lines) based on disease severity index(DSI) in the field3. 讨论
3.1 梢腐病田间分级标准的完善
建立作物病害大田分级标准是一项系统工作。由于品种(系)、栽培方式[9]、生态条件、不同病原[10]以及病虫害并发[11]等原因,科研人员建立病害评价体系要做大量调查和病原菌检测工作。发病率和病情指数是进行作物病害分级时常用的2项指标[12-14],具有易控、准确等特点。本研究以笔者前期大量的室内接种、田间系统调查为基础,结合前人经验、实际生产和其他作物病害分级标准,应用发病率和病情指数2个指标而建立此标准。刘梦林等[4]曾对甘蔗梢腐病发病严重度进行分级,但2级和3级之间对发病症状以及发病叶片数的划分标准存在一定的交叉;此外,田间通常有多张甘蔗叶片同时被梢腐病为害,而前人分级标准最高只有5张发病叶片,不利于田间的调查和有严重度的判别。本研究分级标准基本包含了目前甘蔗田间生产常见病症,其中3级、4级将甘蔗正常生长与否作为主要区别依据,即3级甘蔗叶片受损程度严重,生长点尚未受到影响,4级影响到生长点,但尚能保持生长,表现出蔗茎畸形等症状。而标准中5级主要以梢部无叶片、顶腐以及蔗株死亡为判别依据。根据本研究划分的6个不同抗性水平,虽然12个测试材料中没有出现高抗和高感的材料,但我们在进行其他研究中已经发现高感品种,例如桂糖37号在广西农业科学院甘蔗研究所丁当基地其发病率最高可达到38.72%,病情指数达到32.23。经多次检验,该法将田间病症调查标准、病情指数分级标准与系统聚类分析法结合起来,对于准确快速评价甘蔗田间梢腐病抗性具有很强的指导性。
3.2 不同甘蔗品种(系)感抗梢腐病特征
准确评价甘蔗品种(系)抗病性对于生产的重要性毋庸置疑。本研究结果表明,虽然不同甘蔗品种(系)在不同蔗区表现出感抗梢腐病程度不一,但不同品种(系)之间存在显著抗性差异,且这种差异是一种稳定的遗传特性。甘蔗品种(系)在不同蔗区因受到生态环境等因素影响会表现出感抗不一致性,但只要基于足够规模样本研究,品种(系)的抗性也将不断趋于稳定,其他甘蔗病害研究中也有此规律[15-16]。例如,试验中桂辐06-156、桂糖05-3846、ROC22号、桂糖06-233、桂糖03-3089这5个品种(系)的新植蔗和宿根蔗对梢腐病表现出较高的抗感稳定性。广西主栽品种ROC22号、粤糖94-128多年抗性以及桂糖11号、桂糖37号易感性也表现出此特征。经连年种植甘蔗存在种性不断退化现象,尤其是抗土传性病害能力会不断下降,目前针对甘蔗黑穗病的研究便是一个热点和难点[17],而梢腐病作为一种真菌性病害,主要通过气流传播和受感染的农用设备、灌溉用水、降雨和土壤等方式进行二次传播,其病原菌分生孢子经由毛细管孔道,转移到心叶处,待条件适宜时,首先侵染薄壁状细胞,不经由周围的薄壁组织,病菌进入叶维管束,经叶维管束侵入到蔗茎未成熟的其他部分。目前尚未筛选到完全免疫种质资源,而部分品种(系)宿根蔗却未见病株,因此非常有必要继续开展甘蔗新植和宿根发病情况的跟踪研究,其抗感梢腐病差异性以及遗传脆弱性有待进一步研究。
3.3 不同种植区域甘蔗感抗梢腐病差异
栽培管理模式、工农业规模以及地理生态等因子差异导致作物病害表现出新型流行性特征[18]。业界同行认为甘蔗梢腐病是一种“富贵病”,跟农事操作方式紧密相关,水肥充裕时容易暴发,尤其是高氮条件下其发病率偏高,生产上也发现梢腐病在老蔗区要比新蔗区发病严重,宿根蔗总体发病程度要高于新植蔗[19-20],这与笔者的研究结果基本一致。同时,蔗地边际效应非常突出,例如,笔者调查发现,甘蔗地旁边的地块种植玉米,边际的甘蔗梢腐病发生较地块中间的严重。同时梢腐病表现出逐渐加重趋势,这表明其病原菌数量在田间不断积累,且其传播蔓延受到栽培管理方式等因素的影响较大。2013、2014年广西甘蔗区试验结果表明,河池、柳州蔗区梢腐病暴发情况比南宁、百色地区显著严重,这与本次研究结果一致,而崇左蔗区危害度持续偏高是今年才有的现象,可见梢腐病病原菌传播存在诸多流行性特征,不同蔗区之间发病率和病情指数都存在很大差异,且受到多重因素影响。因此,在进行挖掘高抗或者免疫梢腐病甘蔗种质资源工作时,应采集各蔗区病样来分离鉴定病原菌优势种,从而研究梢腐病病原菌与宿主甘蔗生理生化互作机制,同时结合各蔗区地理生态环境与栽培习惯,深入开展多点多年多轮次调查,系统开展甘蔗梢腐病流行性特征研究,进而为生产上防治梢腐病提供科学依据。
-
![]()
图 2 3种算法在不同规模地图上的搜索结果
Figure 2. Searching results of three algorithms on maps with different scales
表 1 3种遗传算法寻找函数f1(x)、f2(x)最优值的性能比较
Table 1 Peformance comparision of three genetic algorithms searching optimal function f1(x) and f2(x)
算法 收敛数/次 sr ast1)/代 平均收敛值 最优值找齐数/次 结果与实际最优值之差的绝对值 f1(x) f2(x) f1(x) f2(x) f1(x) f2(x) f1(x) f2(x) f1(x) f2(x) f1(x) f2(x) SGA 158 178 0.790 0.89 100 100 1.217 0.142 0 178 0.307 0.011 EGA 190 192 0.950 0.96 85 67 1.493 0.152 0 192 0.031 0.001 GGABE 199 200 0.995 1.00 63 51 1.512 0.153 199 200 0.012 0 1) 只保留整数。  下载: 导出CSV
下载: 导出CSV
表 2 3种遗传算法在不同大小规模的地图中搜索路径时性能比较
Table 2 Performance comparision of three genetic algorithms searching paths on maps with different scales
算法 最大收敛数/代 收敛率 最优路径长度 最优路径数/条 15×15地图 25×25地图 15×15地图 25×25地图 15×15地图 25×25地图 15×15地图 25×25地图 SGA 100 100 0.30 0.14 26.828 4 48.000 0 1 1 EGA 84 95 0.66 0.56 26.242 6 46.828 4 1 1 GGABE 78 82 0.94 0.90 20.970 6 38.041 6 8 8
下载: 导出CSV
-
[1] 张毅, 代恩灿, 罗元. 基于改进遗传算法的移动机器人路径规划[J]. 计算机测量与控制, 2016, 24(1): 313-316. [2] 卢月品, 赵阳, 孟跃强, 等. 基于改进遗传算法的狭窄空间路径规划[J]. 计算机应用研究, 2015, 32(2): 413-418. [3] 张超, 李擎, 董冀媛, 等. 基于混沌粒子群—专用遗传算法切换策略的移动机器人路径规划[J]. 北京科技大学学报, 2013, 35(6): 826-830. [4] KALA R. Multi-robot path planning using co-evolutionary genetic programming[J]. Expert Syst Appl, 2012, 39(3): 3817-3831.
[5] MASOUD S, MOHD F O. Global path planning for autonomous mobile robot using genetic algorithm[C]//Signal-Image Technology and Internet-Based Systems, 2013 International Conference. USA: IEEE, 2013: 726-730.
[6] YUN S C, GANAPATHY V, CHONG L O. Improved genetic algorithms based optimum path planning for mobile robot[C]//Control Automation Robotics and Vision, 2010 11th International Conference. USA: IEEE, 2010: 1565-1570.
[7] MOHANTA J C, PARHI D R, PATEL S K. Path planning strategy for autonomous mobile robot navigation using petri-GA optimisation[J]. Comput Electr Eng, 2011, 37(6): 1058-1070.
[8] 童俊华, 蒋焕煜, 周鸣川. 基于遗传算法的穴盘苗自动移钵路径优化[J]. 农业机械学报, 2013, 44(4): 45-49. [9] BERCLAZ J, FLEURET F, TURETKEN E, et al. Multiple object tracking using k-shortest paths optimization[J]. IEEE T Pattern, 2011, 33(9): 1806-1819.
[10] CHEN D Z, HERSHBERGER J, WANG H. Computing shortest paths amid convex pseudodisks[J]. SIAM J Comput, 2013, 42(3): 1158-1184.
[11] 王峰, 曼媛, 段俊洁. 一种改进的求解前N条最短路径问题的多种标号算法[J]. 小型微型计算机系统, 2016, 37(7): 1482-1487. [12] 岳钦, 冯珊. 粗粒度并行遗传算法的计算性能分析[J]. 武汉理工大学学报, 2008, 30(7): 107-110. [13] TSAI C C, HUANG H C, CHAN C K. Parallel elite genetic algorithm and its application to global path planning for autonomous robot navigation[J]. IEEE Trans Ind Electron, 2011, 58(10): 4813-4821.
[14] 庄嘉祥. 精英策略遗传算法改进及在作物模型参数优化的应用[D]. 南京: 南京农业大学, 2013. [15] 罗熊, 樊晓平, 易晟, 等. 具有大量不规则障碍物的环境下机器人路径规划的一种新型遗传算法[J]. 机器人, 2004, 26(1): 11-16.


计量
- 文章访问数: 1367
- HTML全文浏览量: 0
- PDF下载量: 1490
